
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
1 - 20 / 724
ゴルフスイングの診断方法
情報処理装置、情報処理装置の制御方法、およびプログラム
画像処理装置、画像処理方法
外観検査装置
ステレオ3次元計測装置
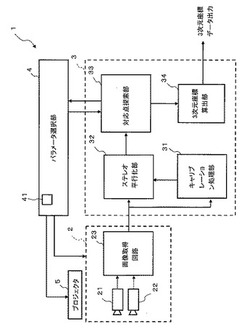
【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
表面欠陥検査方法及び表面欠陥検査装置

【課題】 表面欠陥検査方法及び表面欠陥検査装置に関し、欠陥検査の検知精度の向上を図るために位相シフトを用いつつ検査時間を低減する。
【解決手段】 互いに異なった複数の波長をそれぞれ独立に変調した明暗パターンをパターン平面上で互いに変調させて合成照明パターンを合成し、前記合成した合成照明パターンを検査対象物に照射し、前記検査対象物からの前記合成照明パターンの反射パターンを撮像して波長毎の画像を一括して取得し、前記撮像した画像を波長毎に分解して前記検査対象物の表面の凹凸欠陥を判別する。
(もっと読む)
入射条件の決定方法、データベースの作成方法、パターンの凹部の厚さの計測方法、インプリント装置及び物品の製造方法
【課題】パターンの凹部の厚さの計測に有利な技術を提供する。
【解決手段】残膜厚を算出するときに用いる光の入射条件を決定する方法は、残膜厚RLTとパターンの厚みとの計測感度の差が大きな第1偏光状態の反射光を生成する光の複数の第1入射条件と、残膜厚RLTの計測感度が良い第2偏光状態の反射光を生成する光の複数の第2入射条件とを組み合わせた複数の組み合わせのそれぞれについて、得られた反射光の強度を独立変数とし、前記情報を用いて得られた前記凹部の厚さを従属変数とする回帰式を作成し、作成された複数の回帰式のうち回帰誤差が許容条件を満たす回帰式に対応する第1入射条件を前記第1偏光状態の反射光を生成する入射条件として、該回帰式に対応する第2入射条件を前記第2偏光状態の反射光を生成する入射条件として、それぞれ決定する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
検査装置
【課題】暗視野方式の検査装置などにおいて、信号を実測しながら検査条件を決める方法では時間がかかることと、設定した感度条件が適切か否かの判断が作業者の裁量に左右されることが課題である。
【解決手段】検査装置において、試料を保持するステージと、前記ステージ上に保持された試料の表面に照明光を照射する照明光学系と、前記試料に照射された照射光によって発生した散乱光を検出する暗視野光学系と、前記暗視野光学系にて検出された散乱光を電気信号に変換する光電変換部と、前記光電変換部によって変換された電気信号をデジタル信号に変化するAD変換部と、前記試料表面上の異物からの散乱光の大きさから異物の大きさを判定する判定部と、前記試料面からの散乱光情報を用いて、検査条件を決定する信号処理部とを有する。
(もっと読む)
同軸落射照明の光量設定方法およびラベルの位置ズレ検査方法
【課題】製品に貼着されたラベルの位置ズレ等を光学的に検出する際に、ラベルの印字パターンや製品の色、材質が異なる生産ロットで検査を行う場合にも、容易に照明レベルを適切に設定できる光量設定方法を提供する。
【解決手段】同軸落射照明22により、カメラ21のレンズと同軸上から光を照射し、カメラ21により、テープカートリッジ11上に貼着されたラベル12の貼着状態を検出する。光量設定部25は、同軸落射照明22の光量レベルを低光量レベルから高光量レベルに徐々に上昇させ、ラベル12の外縁と浅溝の縁端により生じる2つのエッジを検出し、全ての部分で2つのエッジが判定できなくなったら、このときの光量に、1以下の実験係数を乗算することで、同軸落射照明22の最適な光量を設定する。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
エッジ位置検出装置
【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に、直線偏光を投射する投光器2と偏光フィルタを介して光を受光する受光器4とを配置し、帯状体10の他方の面側に、投光器2から投射される直線偏光が入射され、入射された直線偏光の偏光方向を偏光フィルタの透過軸に一致する方向に変化させて反射する偏光反射板3を配置する。そして、受光器4の各受光素子で得られた受光量が帯状体10の幅方向でする位置を検出し、その位置を帯状体10のエッジ位置として検出する。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】乾式ガスホルダーに関し、ピストンの傾斜のみならず偏心も監視するための方法および装置を提供する。
【解決手段】筒状のホルダー本体2と、ホルダー本体内に配置された落し蓋状のピストン3と、ピストンとホルダー本体との隙間のシール機構4を具える乾式ガスホルダー1の、ピストンの監視方法において、ピストンの中心位置に偏心量測定テーブル5を設け、ホルダー本体の上端部に、偏心量測定テーブルおよびその近傍並びにその中心位置を含みまたは含まずに互いに多角形を形成する他の複数位置までの高さ方向距離を非接触でそれぞれ計測する距離計6を設け、中心位置の偏心量測定テーブルまでの高さ方向距離に急激な変化が生じた場合にピストンに偏心が生じたと判断し、その高さ方向距離の変化がないか穏やかな場合は、距離計で計測した多角形を形成する複数位置までの高さ方向距離に基づきピストンに傾斜が生じたか否かを判断する。
(もっと読む)
エッジ位置検出装置
【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に製造ラインに存在しない色を着色したカラー板2を配置し、帯状体10を挟んでカラー板2と対向配置したカラーCCDカメラ3によって、カラー板2と帯状体10のエッジ部とを撮像する。そして、カラーCCDカメラ3で撮像したカラー画像の各画素の色情報と、カラー板2の着色面と同一色の色情報との類似度をそれぞれ算出し、帯状体10の幅方向で上記類似度が低下する位置を帯状体10のエッジ位置として検出する。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
エンジンボア表面傷の評価方法
【課題】スカッフィングを精度よく検出できるとともに、スカッフィングの大きさを定量的に評価できるエンジンボア表面傷の評価方法を提供する。
【解決手段】解析画像データ41を取得して、第一周波数スペクトル42を求める工程S10・S20と、フィルタリングした第一周波数スペクトル42を復元し、二次元凹凸データ45を生成するステップS30〜S50と、二次元凹凸データ45から第二周波数スペクトル46を求めるとともに、スカッフィングW3を検出するステップS60・S70と、二次元凹凸データ45から第三周波数スペクトル47を求めるとともに、フィルタリングした第二周波数スペクトル46を復元するステップS80〜S110と、復元した二次元凹凸データ49よりスカッフィングW3を評価するステップS120〜S150とを行う。
(もっと読む)
貼り合せ板状体検査装置及び方法
【課題】貼り合せ板状体における板状体の縁端と接着剤の縁端との間の間隔を比較的容易に検査することのできる貼り合せ板状体検査装置を提供する。
【解決手段】ラインセンサカメラ50と、照明手段51と、照明手段51により照明がなされている状態で貼り合せ板状体10を走査するラインセンサカメラ50から出力される映像信号を処理する処理ユニットとを有し、処理ユニットは、映像信号に基づいて画素単位の濃淡値からなる検査画像情報を生成する検査画像情報生成手段と、検査画像情報から得られる第1板状体11の縁端を横切る検査ライン上の濃淡値プロファイルに基づいて、検査ライン上での第1板状体11の縁端と接着剤13の縁端との間隔を表す縁端間距離情報を生成する縁端間距離情報生成手段とを有し、縁端間距離情報に基づいた検査結果を提供する。
(もっと読む)
1 - 20 / 724
[ Back to top ]