
Fターム[2F065QQ18]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 近似式(例;多項式近似) (1,899) | 最小2乗法 (613)
Fターム[2F065QQ18]に分類される特許
1 - 20 / 613
位置姿勢計測装置、その処理方法及びプログラム
測位システム、測位方法、及びプログラム
光干渉システム、基板処理装置及び測定方法
ステレオ3次元計測装置
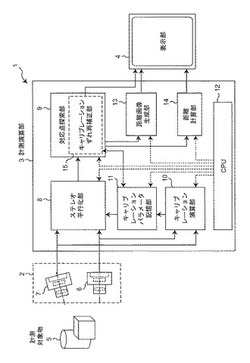
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
変位測定方法および変位測定装置

【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
レーザ照射位置の補正方法、及び、レーザ加工装置
【課題】レーザ加工装置の出荷後再立ち上げにおけるレーザ照射位置の精度の悪化に対して、簡単な測定で精度悪化の傾向を定量把握して最終的に精度の高い補正を行うことが可能とするレーザ照射位置の補正方法が求められていた。
【解決手段】複数の加工エリアに分けて加工を行うレーザ加工装置において、加工エリアごとに対角線上に等間隔に並ぶ試験加工点を複数ヶ所設定し、予め設定された第一の補正データに基づく補正を施して試験加工点を加工するステップと、試験加工点の実際に加工された位置を測定するステップと、加工しようとする位置と実際に加工された位置の平面上のズレ量を直交する二軸で算出するステップと、加工エリアごとに、ズレ量のシフト成分と傾き成分を二軸ごとに算出するステップと、シフト成分と傾き成分をキャンセルするように算出された各加工エリアごとの補正情報を第一の補正データに加味し第二の補正データとする。
(もっと読む)
形状測定装置、構造物製造システム、構造物製造方法
【課題】計測精度を向上する。
【解決手段】形状測定装置は、光源からの光に照らされている被検物を撮像する撮像素子と、撮像素子の受光面(A17)と共役な共役面(A0)を受光面と非平行になるように形成する結像光学系と、撮像素子による撮像の結果から光に照らされている部分の像の位置を検出することにより、被検物の形状に関する情報を取得する形状情報取得部と、を備える。結像光学系は、像を形成する光束が通る範囲において、受光面を含む面と共役面を含む面との交線に直交する直交面上の像面の略中心と物体面の略中心とを直線で結んだときの軸に関して断面形状が非対称であり、かつ交線から最も遠い部分と、交線から最も近い部分とについて、遠い部分から近い部分に向うにつれて直交面上の断面形状の寸法が縮小又は拡大するレンズ要素(52、53)を含むレンズ群(50)を有する。
(もっと読む)
管の内面曲がり測定装置およびそれを用いた測定方法
【課題】管の内面曲がりを定量的に測定できるとともに、様々な内径の鋼管に対応できる管の内面曲がり測定装置およびそれを用いた測定方法を提供する。
【解決手段】被測定材である管の長手方向に移動可能なヘッド21と、ヘッド21によって管10の周方向に揺動可能に支持され、管10の内面までの距離を測定する第1距離計22と、管10の長手方向におけるヘッド21の位置を測定する第2距離計(図示なし)と、ヘッド21の移動および第1距離計22の揺動を制御する制御手段とを備えることを特徴とする管の内面曲がり測定装置20である。本発明では、内面曲がり測定装置20が管10の長手方向に垂直な面におけるヘッド21の変位を測定する変位計を備え、ヘッド21を、管10を長手方向を水平にした状態で該管の内面上を走行する走行機構、および、第1距離計22の揺動軸を水平に維持する維持機構を有する走行装置に設けるのが好ましい。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
回折構造体、広帯域、偏光、エリプソメトリおよび下地構造の測定
【課題】高感度の分光散乱計を提供する。
【解決手段】半導体ウェハ上の回折構造体からの回折の前に、必要な場合は、分光反射率計または分光エリプソメータを使って構造体の下に位置する膜の膜厚と屈折率とをまず測定する。そして、厳密なモデルを使って回折構造体の強度またはエリプソメトリックな署名を計算する。次に、偏光放射線および広帯域放射線を用いた分光散乱計を使って回折構造体を測定して回折構造体の強度またはエリプソメトリックな署名を得る。この署名をデータベース内の署名と適合させて構造体の格子型パラメータを判定する。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
光学特性測定装置および光学特性測定方法
【課題】本発明は、取得したスペクトルから基板上に形成した膜の複数の測定点に対する光学定数を唯一の値として求めることができる光学特性測定装置および光学特性測定方法を提供する。
【解決手段】本発明は、光源10と、検出器40と、データ処理部50とを備えている。データ処理部50は、モデル化部と、解析部と、フィッティング部とを備えている。複数の膜モデル式を連立させ、複数の膜モデル式に含まれる光学定数が同一であるとして所定の演算を行ない、算出した膜の膜厚および光学定数を膜モデル式に代入して得られる波形と、検出器40で取得した波長分布特性の波形とのフィッティングを行なうことにより、複数の膜モデル式に含まれる光学定数が同一で、解析部で算出した膜の膜厚および光学定数が正しい値であることを判定する。
(もっと読む)
基板検査装置
【課題】検査精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置は、実装エリア内のクリームハンダ4及びレジスト膜5の表面の三次元計測を行うと共に、各クリームハンダ4の最高点の位置情報を基に算出した所定の平面を第1仮想基準面K1として設定し、さらに当該第1仮想基準面K1をベース基板2の表面2aに直交する方向に沿って所定位置まで降下させ、第2仮想基準面K2として設定する。そして、当該第2仮想基準面K2からの各クリームハンダ4の突出量を算出し、これを基に当該クリームハンダ4の印刷状態の良否を判定する。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
1 - 20 / 613
[ Back to top ]