
Fターム[2F065QQ21]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 形状特定のためのパラメータ抽出 (463)
Fターム[2F065QQ21]に分類される特許
1 - 20 / 463
光干渉システム、基板処理装置及び測定方法
端子検査装置及び端子検査方法
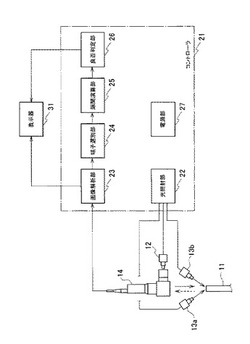
【課題】二股形状端子の側面の状態が変化した場合であっても高精度に先端部の間の隙間距離を測定することが可能な端子検査装置、及び端子検査方法を提供する。
【解決手段】二股形状端子の長手方向に対して平行となる軸方向から、該二股形状端子に向けて青色光を照射し、且つ、軸方向に対して所定角度傾斜した方向から二股形状端子に向けて赤色光を照射する。そして、二股形状端子に照射された青色光、及び赤色光をカメラ14にて撮影し、撮影した画像から青色光、赤色光を抽出する。この抽出結果に基づいて、二股形状端子の側面状態に応じた適切な隙間演算プログラムを選択し、この隙間演算プログラムを用いて二股形状端子の隙間距離dを求める。
(もっと読む)
鋼管の外面曲がり測定方法

【課題】搬送される鋼管が跳ねた場合や楕円または外径の変動が鋼管に生じている場合も正確に測定できるとともに、工数を増大させることなく測定間隔を短くして定量的に測定できる外面曲がりの測定方法を提供する。
【解決手段】複数のローラ31によって鋼管11をその周方向に回転させつつ長手方向に搬送し、ローラ31のうちで隣り合うローラ31の間に鋼管外面の上端および下端の位置を検出する検出器21を等間隔に3台配置し、検出器21で検出した上端および下端の位置から鋼管外面の中心位置を3台の検出器についてそれぞれ求め、下記(1)式により振れwを算出すること特徴とする鋼管の外面曲がり測定方法である。ここで、3台の検出器21のうちで上流側(A位置)での中心位置をCA、中央(B位置)での中心位置をCB、下流側(C位置)での中心位置をCCとする。
w=CB−(CA+CC)/2 ・・・(1)
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
光干渉システム、基板処理装置及び計測方法
【課題】測定可能な膜厚の上限値を容易に変更することができる光干渉システム、基板処理装置及び計測方法を提供する。
【解決手段】光干渉システム1は、光源10、コリメータ12、単一の受光素子41、チューナブルフィルタ40及び演算装置15を備える。コリメータ12は、光源10からの測定光を測定対象物の第1主面へ出射するとともに、第1主面及び第2主面からの反射光を入射する。単一の受光素子41は、コリメータ12からの光の強度を取得する。チューナブルフィルタ40は、受光素子41に入射される光の波長を掃引する。演算装置15は、チューナブルフィルタ40及び受光素子41を用いて、波長に依存した強度分布であって第1主面及び第2主面からの反射光の強度分布である干渉強度分布を測定し、干渉強度分布をフーリエ変換して得られる波形に基づいて測定対象物の厚さ又は温度を計測する。
(もっと読む)
撮像素子の異物検出方法及びその装置
【課題】撮像素子の受光面とその前方に配置されたカバーガラス等の透明体の前面及び背面のうちのいずれかの表面に存在する異物の位置、大きさ、形状を特定することができる撮像素子の異物検出方法及びその装置を提供する
【解決手段】本発明に係る異物検出装置は、撮像素子パッケージ2を装着部50に装着し、光源部60から照明光を照射して、撮像素子10の受光面の像を撮像する。光源部60から受光面10Aに照射する照明光は、例えば、平行光と、点光源からの拡散光とで切り替えられ、各々の照明光により照明している状態で撮像した撮影画像を制御・検査部80に取り込み、それらの画像を比較することによって、異物の3次元的な位置、大きさ、形状を特定する。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法
【課題】測定対象物の寿命に影響する熱歪(拘束歪)を容易に測定する。
【解決手段】歪測定装置は、コンピュータ1と、測定対象物の第1ステレオ画像PS1を生成する第1ステレオカメラ2と、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成する第2ステレオカメラ3と、測定対象物の温度分布を検出するサーモビュア4と、を備える。また、コンピュータ1は、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物の三次元形状を求めて、実歪εc(i,j)を求める実歪算出部12と、サーモビュア4によって検出された温度分布から熱自由歪εt(i,j)を求める熱自由歪算出部17と、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める拘束歪算出部18と、を備える。
(もっと読む)
形状検査方法およびその装置
【課題】 複数の3次元形状計測法、表面計測手法を相補的に組み合わせることで、測定対象の形状によらず高い計測精度を確保した3次元形状検査方法およびその装置を提供することを目的とする。
【解決手段】 本発明は、検査対象の参照モデルの形状データである参照データを格納する格納部と、前記参照データから第1の形状データを取得する領域を特定する領域特定部と、前記領域特定部で特定した領域について前記第1の形状データを取得する第1の3次元形状センサと、前記領域特定部で特定した領域以外の領域について前記検査対象の前記第1の形状データとは異なる第2の形状データを取得する第2の3次元形状センサと、前記第1の形状データと前記第2の形状データとを統合する相補的統合部とを備えることを特徴とする3次元形状検査装置を提供する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
缶口金の加締不良検出方法及び検出装置
【課題】金属缶の天板部材に注出口として加締装着した口金について、加締装着を終えた段階で加締不良を迅速かつ確実に検出する手段を提供する。
【解決手段】天板部材11の口金2装着部分の全体に無影光を照射して稜線及び谷の輝度が同心円状に分布するように撮像し、画像処理装置4により、撮像した画像から、環状加締部3の稜線R1,R2を切り出し、稜線R1,R2に対応する近似真円C1,C2を演算して作定し、近似真円C1,C2と切り出し稜線R1,R2とに囲まれた領域Z1,Z2の面積を算出し、算出面積と設定した判定基準面積とを比較演算し、算出面積が判定基準面積以上である場合を加締不良と判定する。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
切断面の検出方法
【課題】画像処理の負担を軽減し、容易かつ正確に切断面を区別することのできる、新規の切断面の検出方法を提供する。
【解決手段】第1の偏光フィルタ2の偏光方向2aを所定の方向に向けて第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを直交させ、照明光1を第1の偏光フィルタ2を透過させ試料3の切断面3b,3cで反射させてから第2の偏光フィルタ4を透過させデジタルカメラ5により撮影して第1の画像を取得し、第1の偏光フィルタ2の偏光方向2aを所定の方向から45度傾かせて第2の画像を取得し、第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを平行にして第3の画像を取得し、第1、第2、第3の画像を加算する。
(もっと読む)
熱画像データ保存装置
【課題】監視対象となる高温物が所定の撮像位置に位置したことを検出するための機械的リミットスイッチを用いず、それを設置するためのスペース及び作業コストが不要になる熱画像保存装置の提供。
【解決手段】熱画像2aを生成する熱画像生成手段2には、熱画像2aの処理を行う熱画像処理手段3が接続されている。熱画像処理手段3には、取鍋4が所定の撮像位置に位置した際に熱画像2a内で取鍋4が占める領域内の温度を監視して、領域内の温度が所定の検出用閾値以上である場合に、取鍋4が撮像位置に位置したことを検出する位置検出部30が含まれている。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
物品認識装置における照明の設定値設定方法および物品認識装置
【解決手段】ボンディング装置を構成する物品認識装置は、基板のバンプに照明光を照射する第1照明と、該第1照明とは異なる角度から上記バンプに照明光を照射する第2照明と、上記バンプで反射した上記照明光の反射光を撮影する第1撮影手段とを備えている。上記第2照明の輝度を固定したまま、第1照明の輝度を変化させて(S3)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における第1照明の輝度を記憶する(S7)。続いて第1照明の輝度を上記記憶した輝度で固定したまま、第2照明の輝度を変化させて(S9)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における上記一方の照明の輝度を記憶する(S13)。
【効果】照明の設定値の設定を容易にかつ安定して行うことができる。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
1 - 20 / 463
[ Back to top ]