
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
1 - 20 / 553
光干渉システム、基板処理装置及び測定方法
下水圧送管路におけるピグ位置検出装置
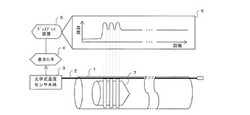
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
部品実装装置および部品実装方法

【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
樹脂硬化収縮測定器
【課題】樹脂硬化に伴う樹脂の収縮は、接着部材のずれ、ゆがみ、片方の外れ、接着不良等の不具合が発生する場合がある。精密部品や光学部品の固定には小さな収縮率でも、光軸のずれなどが起りトラブルの原因となっている。
【解決手段】接着用樹脂を硬化させながら、その収縮を測定することにより樹脂の収縮率を把握する。収縮率が把握できると、あらかじめ樹脂収縮を加味して部品配置の設計が可能となる。また、原因を推察する上での基礎資料となり、トラブル解消が短縮される。
(もっと読む)
端末装置、画像処理方法、及びプログラム
【課題】画像データに対する計測記録データを容易に作成することができる端末装置、画像処理方法、及びプログラムを提供する。
【解決手段】記憶部140は、画像データ内の第1座標範囲と、第1座標範囲に関する第1計測値データと、が関連付けられた第1画像データを保持する。制御部150は、第2画像データ内の第2座標範囲をユーザの指定に応じて取得する。解析部160は、第1座標範囲の画像パターンと第2座標範囲の画像パターンを比較し、比較結果及び第1計測値データに基づいて、第2座標範囲に関する第2計測値データを算出する。
(もっと読む)
作業位置誘導装置及びその誘導方法
【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
光干渉システム、基板処理装置及び計測方法
【課題】測定可能な膜厚の上限値を容易に変更することができる光干渉システム、基板処理装置及び計測方法を提供する。
【解決手段】光干渉システム1は、光源10、コリメータ12、単一の受光素子41、チューナブルフィルタ40及び演算装置15を備える。コリメータ12は、光源10からの測定光を測定対象物の第1主面へ出射するとともに、第1主面及び第2主面からの反射光を入射する。単一の受光素子41は、コリメータ12からの光の強度を取得する。チューナブルフィルタ40は、受光素子41に入射される光の波長を掃引する。演算装置15は、チューナブルフィルタ40及び受光素子41を用いて、波長に依存した強度分布であって第1主面及び第2主面からの反射光の強度分布である干渉強度分布を測定し、干渉強度分布をフーリエ変換して得られる波形に基づいて測定対象物の厚さ又は温度を計測する。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
光学的位置検出装置
【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
形状計測装置、形状計測システム、及び形状計測方法
【課題】低いコストで、広い高さ範囲を高精度に計測可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、測定物4が配置されるステージ14と、格子3を透過した第1の光、及び格子3を透過した第2の光の両方が透過する投影光学系5であって、第1の光を第1の入射角で測定物4表面に入射させ、第2の光を第2の入射角で測定物4表面に入射させる投影光学系5と、第1の光による測定物4表面の格子3の第1の変形像、及び第2の光による測定物4表面の格子3の第2の変形像に基づき、測定物4表面の高さの分布を算出する高さ分布算出部と、を備える、形状計測装置。
(もっと読む)
計測装置及び電気的装置
【課題】光学センサを用いて用紙搬送量を正確に特定する。
【解決手段】画像形成装置は、記録ヘッドを搭載するキャリッジを主走査方向に搬送し、用紙を搬送ローラを通じて主走査方向とは垂直な副走査方向に搬送する。この画像形成装置は、キャリッジの静止状態で、用紙搬送方向に平行な第一の検出方向への用紙移動量及びキャリッジ搬送方向に平行な第二の検出方向への用紙移動量を検出可能な光学センサを備える。キャリッジに固定された光学センサは、キャリッジの移動に伴って、キャリッジと共に傾くため、本装置では、リニアエンコーダを用いて検出したキャリッジ位置、ロータリエンコーダを用いて検出した搬送ローラ回転量、及び、光学センサの検出値を用いて、光学センサの傾き(角度θ)を算出する(S270)。そして、用紙搬送中にキャリッジが搬送される際には、光学センサにより検出された第一の検出方向の用紙移動量を上記角度θに基づいて補正する。
(もっと読む)
高さ位置検出装置およびレーザー加工機
【課題】チャックテーブルに保持された被加工物の高さ位置を正確に検出することができる高さ位置検出装置および高さ位置検出装置を装備したレーザー加工機を提供する。
【解決手段】発光源81と、強度分布を整形するNDフィルター83と、集光して被加工物Wに照射する集光器7と、第1の経路と第2の経路に導く第1のビームスプリッター84と、第3の経路と第4の経路に分光する第2のビームスプリッター86と、第3の経路に分光された反射光を受光する第1のホトデテクター88aと、第4の経路の反射光を帯状に通過させるスリット891を備えたマスク89と、マスクを通過した反射光を受光する第2のホトデテクター88bと、第1のホトデテクターによって受光した光量と第2のホトデテクターによって受光した光量との比率を求め、比率に基づいてチャックテーブル36に保持された被加工物の高さ位置を求める制御手段とを具備している。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
撮像装置、並びに、これを用いる画像解析装置及び移動装置
【課題】撮像領域内の各地点からの光に含まれる偏光成分間の大きさの違いを示す指標値に基づく画素値をもった偏光情報画像の高精度な解析処理を実現することを課題とする。
【解決手段】水平偏光成分P及び鉛直偏光成分Sの大きさの違いを示す差分偏光度(指標値)を算出し、算出した各指標値に基づく画素値をもった差分偏光度画像(偏光情報画像)を撮像するという撮像動作を連続して行うことで、露光量が互いに異なる例えば3種類の偏光情報画像を撮像する。そして、過去の撮像動作により撮像された3種類の偏光情報画像の中から、偏光成分間の大きさの違いが最大である特定の偏光情報画像を選定し、選定した特定の偏光情報画像に対応する露光量に基づいて後の撮像動作時の露光量を決定する。
(もっと読む)
半導体レーザ素子の端面角度測定方法
【課題】半導体レーザ素子の共振端面の角度を容易に且つ精度良く測定することができる方法を提供する。
【解決手段】光導波路の光導波方向と交差する方向に並んだ複数の半導体レーザ素子を含む半導体レーザバー2を、共振端面2aが所定の基準線21bに沿うようにステージ21の基準面21a上に固定し、半導体レーザバー2の複数の半導体レーザ素子の共振端面からレーザ光Laを出射させ、レーザ光LaのFFPを測定し、FFPのピーク位置により定まるレーザ光Laの出射方向と、所定の基準線21b及び基準面21aとの相対角度から、半導体レーザ素子の共振端面の角度を算出する。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
1 - 20 / 553
[ Back to top ]