
Fターム[2F065QQ41]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372)
Fターム[2F065QQ41]の下位に属するFターム
Fターム[2F065QQ41]に分類される特許
1 - 20 / 527
画像処理装置、画像処理方法
3次元座標算出装置、3次元座標算出方法、及びプログラム
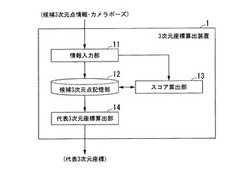
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
樹脂製保持器の欠陥検査装置及び欠陥検査方法

【課題】樹脂製保持器に対して高精度に欠陥等を検出することができる樹脂製保持器の欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】転動体7が保持されるポケット8を周方向に沿って複数個有する樹脂製保持器1の欠陥を検査する。樹脂製保持器1をその軸心廻りに回転駆動させつつ、樹脂製保持器1のアキシャル方向及び/又はラジアル方向の変位を検出し、この変位量に基づいて良品判定を行う。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
回折構造体、広帯域、偏光、エリプソメトリおよび下地構造の測定
【課題】高感度の分光散乱計を提供する。
【解決手段】半導体ウェハ上の回折構造体からの回折の前に、必要な場合は、分光反射率計または分光エリプソメータを使って構造体の下に位置する膜の膜厚と屈折率とをまず測定する。そして、厳密なモデルを使って回折構造体の強度またはエリプソメトリックな署名を計算する。次に、偏光放射線および広帯域放射線を用いた分光散乱計を使って回折構造体を測定して回折構造体の強度またはエリプソメトリックな署名を得る。この署名をデータベース内の署名と適合させて構造体の格子型パラメータを判定する。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
ボトルの液状収容物の入味検査方法及びボトル入味検査システム
【課題】検査精度を上げて入味容量のバラツキを少なくできるようにする。
【解決手段】キャップ天面高さと満注容量との相関関係を予め測定して第1相関関係情報を取得すると共に、最低充填容量を設定し、満注容量よりも所定量減量した液状収容物をボトルに充填した場合の入味線高さとキャップ天面との高低差と、所定量との相関関係を求めて第2相関関係情報を取得しておいて、被検査用ボトルに対するキャップ天面高さを計測して第1相関関係情報から満注容量を決定すると共に、満注容量と最低充填容量との差に対応する差分高さを第2相関関係情報から算出して、被検査用ボトルに対応する許容最低入味線高さを求め、液状収容物の実入味線高さを計測し、許容最低入味線高さと実入味線高さとを比較して、実入味線高さが高ければ良品と判定し、実入味線高さが低ければ不良品と判定する。
(もっと読む)
回路基板の個体識別装置および個体識別方法
【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
マスク表面粗さ測定方法及び測定装置
【課題】ブランクマスクの欠陥等に起因する測定値の誤り発生を招くこと無しに、ブランクマスクの所望領域の表面粗さを迅速に測定する。
【解決手段】露光用マスクを作製するためのブランクマスクの表面粗さを測定するマスク表面粗さ測定方法であって、ブランクマスクに測定光を入射させ、該マスクによる暗視野像を取得する光学系を用い、該マスク上の任意領域の暗視野像を取得する第1のステップと、任意領域内の注目位置における暗視野像の像強度が予め定めておいたしきい値未満の場合に、該注目位置の周辺領域の像強度と予め定めておいた関係式とを用いて表面粗さを求める第2のステップと、任意領域の全ての点において第2のステップを繰り返し、得られた表面粗さを平均化する第3のステップと、第3のステップで得られた平均値を、任意領域の表面粗さとして出力する第4のステップと、を含む。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
塗布状態測定方法
【課題】測定対象物に塗布された塗布物質の塗布状態をより簡単に精度よく測定する。
【解決手段】測定対象物を撮像して測定対象物のスペクトル画像を取得する画像取得ステップS01と、画像取得ステップにより得られたスペクトル画像に基づいて、塗布物質の種類を判別する塗布物判別ステップS02と、画像取得ステップにより得られた前記スペクトル画像に基づいて、塗布物質の塗布量を測定する塗布量測定ステップS03と、を備える。
(もっと読む)
コールドピルガー圧延管を製造する方法及び装置
【課題】コールドピルガー圧延時に、変形加工工程中に得られた測定データに基づいて、少なくとも1つの変形加工工具の位置調節を可能にする、自動化可能な製造方法及びこのために好適な装置を提供する。
【解決手段】外側から管8に作用する少なくとも1つの変形加工工具4に、少なくとも1つの位置調節装置7が作用結合されており、位置調節装置7は、測定装置5に接続されているようにした。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
情報処理装置、情報処理方法
【課題】誤検出指標や検出精度の低い指標による影響を減少させ、高精度かつより安定な撮像装置の位置姿勢計測方法を提供する。
【解決手段】指標検出部2030は、物体上に配置または設定された指標P1、P2、P3を撮像画像から検出する。評価量算出部2060は評価量を、指標P1、P2、P3の画像上での2次元幾何特徴及び/又は指標P1、P2、P3の3次元空間中における撮像装置2010と指標P1、P2、P3との間の関係を表す3次元幾何特徴を利用して算出する。信頼度算出部2070は、算出した指標P1、P2、P3の評価量に応じて指標P1、P2、P3の信頼度を算出する。位置姿勢算出部2080は、算出された指標P1、P2、P3の信頼度と、検出された夫々の指標P1、P2、P3の画像座標に関する情報とを少なくとも用いて、物体または撮像装置2010の位置姿勢を求める。
(もっと読む)
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
画像処理による渡り線測定装置
【課題】渡り線と背景の切り分けを高精度に行うことが可能な画像処理による渡り線測定装置を提供する。
【解決手段】車両の屋根上に設置されたラインセンサカメラ2と、車両の内部に設置された計測用コンピュータ3とを備えた画像処理による渡り線測定装置において、計測用コンピュータ3が、ラインセンサ画像作成部3aと、標準偏差背景除去処理部3bと、判別分析二値化処理部3cと、ノイズ除去処理部3dと、渡り線部エッジ検出部3eと、渡り線部高さ計算部3fと、渡り線部偏位計算部3gとを備えるようにし、ラインセンサ画像に対して標準偏差背景除去処理を行ったうえで二値化処理を行うことにより渡り線と背景との切り分けを行うようにした。
(もっと読む)
1 - 20 / 527
[ Back to top ]