
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
1 - 20 / 1,443
環境認識装置
アライメントマーク変形推定方法、基板位置予測方法、アライメントシステムおよびリソグラフィ装置
外観検査装置
ガラス基板検査装置及びガラス基板製造方法
傾斜測定装置およびその方法
変位測定方法および変位測定装置
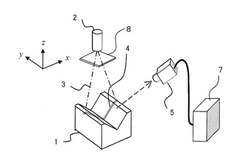
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
対象検出装置および対象検出方法

【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
下水圧送管路におけるピグ位置検出装置
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
横断歩道検出装置
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】背景が含まれる場合であっても、背景の明るさの影響を低減して検査対象物表面の明るさを自動的に調整することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を含む撮像領域を撮像する撮像部と、撮像領域を前記撮像部で撮像した画像に対して画像処理を実行する画像処理部とを備える。画像処理部は、撮像部から出力された画像の撮像領域内に設けられ、各々が複数の画素を含む複数の小領域ごとに、検査対象物が存在する可能性を示す特徴量を算出する。算出した特徴量に基づいて、少なくとも検査対象物を含む画像の明るさの評価値を算出し、算出した評価値に基づいて、画像の明るさを調整するための調整信号を出力する。
(もっと読む)
表面検査装置、表面検査方法、および露光システム
【課題】露光時の走査方向の違いによって生じるスキャン精度の差異を求めることが可能
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
(もっと読む)
車両ドア開閉の検知装置および検知方法
【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
検査装置
【課題】暗視野方式の検査装置などにおいて、信号を実測しながら検査条件を決める方法では時間がかかることと、設定した感度条件が適切か否かの判断が作業者の裁量に左右されることが課題である。
【解決手段】検査装置において、試料を保持するステージと、前記ステージ上に保持された試料の表面に照明光を照射する照明光学系と、前記試料に照射された照射光によって発生した散乱光を検出する暗視野光学系と、前記暗視野光学系にて検出された散乱光を電気信号に変換する光電変換部と、前記光電変換部によって変換された電気信号をデジタル信号に変化するAD変換部と、前記試料表面上の異物からの散乱光の大きさから異物の大きさを判定する判定部と、前記試料面からの散乱光情報を用いて、検査条件を決定する信号処理部とを有する。
(もっと読む)
樹脂製保持器の欠陥検査装置及び欠陥検査方法
【課題】樹脂製保持器に対して高精度に欠陥等を検出することができる樹脂製保持器の欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】転動体7が保持されるポケット8を周方向に沿って複数個有する樹脂製保持器1の欠陥を検査する。樹脂製保持器1をその軸心廻りに回転駆動させつつ、樹脂製保持器1のアキシャル方向及び/又はラジアル方向の変位を検出し、この変位量に基づいて良品判定を行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
光干渉システム、基板処理装置及び計測方法
【課題】測定可能な膜厚の上限値を容易に変更することができる光干渉システム、基板処理装置及び計測方法を提供する。
【解決手段】光干渉システム1は、光源10、コリメータ12、単一の受光素子41、チューナブルフィルタ40及び演算装置15を備える。コリメータ12は、光源10からの測定光を測定対象物の第1主面へ出射するとともに、第1主面及び第2主面からの反射光を入射する。単一の受光素子41は、コリメータ12からの光の強度を取得する。チューナブルフィルタ40は、受光素子41に入射される光の波長を掃引する。演算装置15は、チューナブルフィルタ40及び受光素子41を用いて、波長に依存した強度分布であって第1主面及び第2主面からの反射光の強度分布である干渉強度分布を測定し、干渉強度分布をフーリエ変換して得られる波形に基づいて測定対象物の厚さ又は温度を計測する。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】凹凸マークが形成されたサイドウォール面を有するサンプルタイヤの画像を用いて、検査タイヤのサイドウォール面の形状欠陥を検査するタイヤ形状検査方法において、次の工程を実行する。まず、ティーチング作業工程として、サンプルタイヤのサンプル原画像において、凹凸マークの境界線を検出し、境界線を示すマスク画像を生成し、サンプル原画像からマスク画像に示された境界線に対応する領域を除き、残りの領域の高さを1又は複数のオフセット値で表す高さオフセット画像を生成する。次に、検査作業工程として、検査タイヤの検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去し、得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
計測装置
【課題】コストの増加を抑えながら参照面と被検面との間の光路長差の変化に起因する計測誤差を低減し、参照面と被検面との間の距離を計測する計測装置を提供する。
【解決手段】周波数を走査可能なn(n=2以上の整数)個の光源と、前記n個の光源からのそれぞれの光を分割し、参照面と被検面とに入射させる分割素子と、前記参照面で反射された光と、前記被検面で反射された光との干渉により形成されるn個の干渉光を検出して干渉信号を出力する検出部と、前記距離を求める処理部と、前記処理部は、前記n個の光源のうち1つの第1光源からの光の周波数を第1方向に第1走査速度で走査するように制御し、且つ、前記n個の光源のうち他の1つの第2光源からの光の周波数を第1方向とは逆の第2方向に前記第1走査速度とは異なる第2走査速度で走査するように制御し、前記n個の光源を制御している間の前記干渉信号に基づいて、前記距離を求める。
(もっと読む)
コンクリート打継面の評価装置
【課題】先行して打設したコンクリートの表面に新たなコンクリートを打設する打継面の評価を、客観的に行う装置と方法を提供する。
【解決手段】
ラインレーザー1とデジタルカメラ2と解析用パソコン3によって構成する。ライン状のレーザー光線をコンクリート打継面4に照射する。その照射線41をデジタルカメラ2で撮影する。撮影した照射線41を画像解析することで座標データとして抽出してコンクリート表面の評価を行う。
(もっと読む)
1 - 20 / 1,443
[ Back to top ]