
Fターム[2F065QQ43]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | ヒストグラム作成 (252)
Fターム[2F065QQ43]に分類される特許
1 - 20 / 252
情報処理装置、情報処理装置の制御方法、およびプログラム
視線分析装置、視線計測システム、方法、プログラム、記録媒体
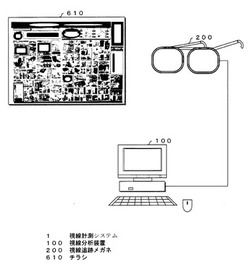
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
検査装置、検査方法及び検査プログラム

【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
研削工具の砥面検査システム及び方法
【課題】砥粒の状態を新たな解析パラメータを用いてより詳しく解析し、これにより砥面の状態をさらに正確に検査できるようにする。
【解決手段】カメラ6により砥石3の砥面を撮像してそのライン画像データを取り込み、各ライン画像データに対し砥粒抽出処理部123により複数種のフィルタリング処理を行うことで上記ライン画像データから砥粒切れ刃候補の画像を抽出する。そして、砥粒解析処理部124の制御の下で、上記抽出された各砥粒切れ刃候補の画像から、砥面全域における各砥粒切れ刃候補の重心の座標と、凸多角形近似データ及び円形度と、内部欠損及び外部欠損と、面積及び欠損度と、すくい角側の稜線形状をそれぞれ算出または検出する。そして、この得られた解析パラメータをもとに、砥石3の幅方向における砥粒分布ヒストグラムと、砥石3の砥面全域における砥粒の分布状態を表す三次元マップを生成する。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
塗布方法および塗布装置
【課題】各吐出ノズルの吐出量を正確に把握し、精度良く全ノズルの吐出量を調整することができる塗布方法および塗布装置を提供する。
【解決手段】吐出ノズルから液滴を吐出し、基板へ塗布を行う吐出工程と、吐出ノズルから吐出した液滴の着弾面積を測定する測定工程と、前記吐出工程における各吐出ノズルの制御量を調節する調節工程と、を有する塗布方法において、前記調節工程では、前記吐出工程が行われる前に実施された前記測定工程の過去データの蓄積から得られる統計データにもとづいて、この吐出工程における各吐出ノズルの制御量の調節を行うことを特徴とする。
(もっと読む)
光検査方法及びその装置
【課題】
光検査装置において、検出する光が微弱な場合に問題となる量子ノイズの影響を抑制する。
【解決手段】
光検査装置を、試料に光を照射する光照射手段と、参照光を発射する参照光手段と、光照射手段により光が照射された試料からの透過光または散乱光または反射光と、参照光手段から発射された参照光とを干渉させて干渉光を生成する光干渉手段と、光干渉手段により生成した干渉光を検出する光検出手段と、光検出手段により干渉光を検出して得られた検出信号に基づいて欠陥の有無を識別する欠陥識別手段と、試料からの透過光または散乱光または反射光の状態または参照光手段から発射された参照光の状態または光干渉手段により生成した干渉光の状態のうち少なくとも一つを変換する光変換手段とを備えて構成した。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
光学センサ及び画像形成装置
【課題】対象物の相対的な位置情報を短時間で精度良く検出することができる光学センサを提供する。
【解決手段】 面発光レーザアレイを含む光源11、非平行透明部材12、コリメートレンズ13、対物レンズ14、及び処理装置などを備えている。面発光レーザアレイの複数の発光部から射出された複数の光束は、Z軸方向に関して互いに異なる位置に集光される。そして、処理装置は、面発光レーザアレイの複数の発光部に一定の電圧を印加するとともに、発光部毎にセルフミキシング信号をプリンタ制御装置に出力する。プリンタ制御装置は、各発光部のセルフミキシング信号に基づいて、Z軸方向に関する記録紙との距離を求める。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
回折光学素子及び計測装置
【課題】均一で安定性の高い光スポットを発生させる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されている第1の回折素子と、複数の基本ユニットが2次元的に配列されている第2の回折素子と、を有し、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記第1の回折素子において前記基本ユニットの配列方向を第1の方向とし、前記第2の回折素子において前記基本ユニットの配列方向を第2の方向とし、前記光が前記第1の回折素子、前記第2の回折素子の順に入射するとき、前記第1の回折素子で発生する回折光がさらに、前記第2の回折素子に入射して発生する0次光の最近接距離をΔxとし、前記第2の回折素子により発生する回折光及び迷光における最近接距離をαとした場合、前記第1の方向と前記第2の方向のなす角φが、−|φ1|<φ<|φ1|、かつ、φ≠0、sinφ1=−α/Δxであることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
パターンの形成された基板の粗さを得る方法、パターンの形成された基板の粗さを得るための装置
【課題】パターン付きウェハの表面粗さを高精度で非破壊に測定できる平坦な検査範囲を、目視によらず探索できる表面検査装置を提供する。
【解決手段】照射される照射光により生じる散乱光の散乱光強度を、パターン付きウェハ200上の測定座標に対応付けて測定し、ウェハ200の表面粗さを検査する表面検査装置において、制御部が、下限閾値以上である散乱光強度の測定座標を抽出し、抽出された測定座標の周辺に相当するパターンの全体レイアウト401の一部の部分レイアウト405a内に、表面粗さの検査の検査範囲406を設定し、検査範囲406における表面粗さを求める。
(もっと読む)
1 - 20 / 252
[ Back to top ]