
Fターム[2F065QQ51]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | カウンター (263)
Fターム[2F065QQ51]の下位に属するFターム
カウント開始点 (7)
カウント終了点 (1)
カウント値ホールド、ラッチ (1)
Fターム[2F065QQ51]に分類される特許
1 - 20 / 254
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
電子測定器

【課題】測定対象物の寸法を電子的に測定可能な電子測定器を提供する。
【解決手段】等ピッチで1列に並べられた受光素子アレイ20と、受光素子アレイ20に結像するレンズ系16と、測定対象物25へ光を照射する光源26と、測定対象物25から反射した光を受光素子アレイ20により受光して出力されるアナログ信号をディジタル処理する信号処理部28と、信号処理部28によって得られたディジタル計数値DSを表示する表示部12とを備え、ディジタル計数値DSにより、測定対象物25の大きさを表示することを特徴とする電子測定器10。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
ベルト検査装置
【課題】ベルトの深さ方向の傷の検出精度を向上させるベルト検査装置を提供する。
【解決手段】所定方向に形成された内側平坦部20及び外側平坦部22と、湾曲側部29a、29bとを輪郭とする略矩形断面を呈する薄型金属ベルト18の表面に存在する傷を検査するベルト検査装置30であって、内側平坦部20側から照明光を湾曲側部29a、29bに出力する赤色光源48、50と、外側平坦部22側から、前記湾曲側部によって反射された照明光を撮影するカラーカメラ40、42と、カラーカメラ40、42が照明光を撮影した画像に基づいて薄型金属ベルト18の表面状態を判定する表面状態判定部78とを備え、表面状態判定部78は、撮影された照明光の幅を計測し、該照明光の幅に基づいて、薄型金属ベルト18に、所定方向を深さ方向とする傷があるか否かを判定する。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機
【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
欠陥分類装置
【課題】
本発明は集積回路、磁気ヘッド、磁気ディスク、太陽電池、光モジュール、発光ダイオード、液晶表示パネルなど基板上に発生した欠陥や異物の画像を撮像し、欠陥や異物を種類ごとに分類する欠陥分類装置において、撮像した画像に写っている欠陥の重要度を定量的に計算し、重要度の高い欠陥が写っている画像だけをデータベースに保存することで、ネットワーク負荷やデータベース負荷を低減する。
【解決手段】
本発明は、欠陥座標データを入力し、画像撮像プログラム501にて画像を撮像し、特徴量抽出プログラム502にて撮像した画像から欠陥の特徴量を抽出し、欠陥分類プログラム503にて欠陥を種類別に分類し、重要度予測プログラム504にて欠陥毎に重要度を計算し、画像選別プログラム506にて重要度に基づいて画像をデータベースに伝送するか否かを判定する。
(もっと読む)
転がり軸受の表面検査装置
【課題】軌道輪表面の仕上がりの良否を簡易にかつ自動的に判断可能であり、製造コストが安価であると共に検査処理が簡単でありしかも精度の高い検査が可能な転がり軸受の表面検査装置を提供する。
【解決手段】検査表面に対しレーザ光を照射し、表面で反射したレーザ光を受光するレーザ光送受手段と、受光した光強度に対応する電気信号を出力する光電変換手段と、レーザ光照射部を軌道輪の軸と同軸で回転させる周方向走査手段と、レーザ光送受手段を軌道輪の軸に沿って移動する軸方向走査手段と、周方向走査の各位置において、光電変換手段から出力される電気信号出力の、軸方向における最大値を取得する最大値取得手段と、取得した最大値のうち、ハレーション状態に対応する最大値の個数を計数するハレーション個数計数手段と、ハレーション個数計数手段により計数されたハレーション個数に応じ、軌道輪の良否を判断する判断手段とを備える。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
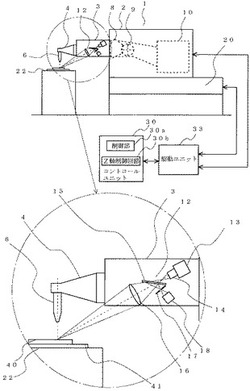
検出装置
【課題】合焦精度の低下を軽減する。
【解決手段】ラインピクセルにより受光される光量データが飽和したとき、ラインピクセルの略中央のピクセルである合焦ピクセルを過ぎたときの前後2ピークのピークピクセルを決定し(S11)、決定したピークピクセルにおけるZ軸カウンタ値を取得し(S12)、取得したZ軸カウンタ値を直線補間して、合焦ピクセルにおけるZ軸カウンタ値を推定し(S13)、推定された合焦ピクセルにおけるZ軸カウンタ値に基づいて、対象物2の面位置を検出する(S14)ので、受光される光量が飽和したときでも、合焦精度の低下を軽減することができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
印刷はんだ検査装置および印刷はんだ検査方法
【課題】プリント板上の測定しようとするはんだ箇所に対し、高さの基準となる基準面を設定し、その基準面に対するはんだの高さを求めるときに、部品実装後のプリント板を分割するために加工された分割用加工部の影響を受けないようにする技術を提供する。
【解決手段】変位センサがはんだが印刷されたプリント板を光学的に計測し、このプリント板の高さの変位を示す変位情報を出力し、分割ライン決定部がプリント板を分割するための分割用加工部を変位情報に基づき検出し、プリント板の分割ラインを分割ライン情報として出力する。基準面算出領域設定手段は、分割ライン情報を受け分割ラインの内側の領域内に基準面算出領域を設定し、基準面算出手段が基準面算出領域内の変位情報に基づいて、基準面算出領域に形成される平面を基準面として設定する。変位測定部は、はんだ箇所のはんだの高さを、はんだ箇所の変位情報と設定された基準面とから算出する。
(もっと読む)
1 - 20 / 254
[ Back to top ]