
Fターム[2F065SS01]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715)
Fターム[2F065SS01]の下位に属するFターム
被測定物の像 (830)
キャラクター(文字、数字) (406)
等級;良、不良 (354)
Fターム[2F065SS01]に分類される特許
1 - 20 / 125
下水圧送管路におけるピグ位置検出装置
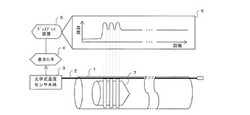
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
FBGセンサの多点計測方法および多点計測装置

【課題】1本の伝送路で複数本の光ファイバを使用する状況においても、光スイッチを用いることなく、複数本の光ファイバのFBGセンサを計測可能なFBGセンサの多点計測方法および装置を提供する。
【解決手段】FBGセンサの多点計測装置において、コアに回折格子を形成した光ファイバ4と、広帯域波長光源9と、この光源からの光のうち、光ファイバ4に入射する光の時間を制御する光源側光変調器10と、この光変調器からの出射光を入射して、光ファイバ4の回折格子からの反射光を透過する時間を制御する検出側光変調器12と、この光変調器からの反射光を検出して得られた信号を処理して光ファイバ4からの信号を分離する波長移動量算出器14と、この算出器の結果から被測定物の変形量を算出する温度・歪み算出器15と、この被測定物の変形量に関する情報を表示する表示部16とを有する。
(もっと読む)
形状測定装置、構造物製造システム、構造物製造方法
【課題】計測精度を向上する。
【解決手段】形状測定装置は、光源からの光に照らされている被検物を撮像する撮像素子と、撮像素子の受光面(A17)と共役な共役面(A0)を受光面と非平行になるように形成する結像光学系と、撮像素子による撮像の結果から光に照らされている部分の像の位置を検出することにより、被検物の形状に関する情報を取得する形状情報取得部と、を備える。結像光学系は、像を形成する光束が通る範囲において、受光面を含む面と共役面を含む面との交線に直交する直交面上の像面の略中心と物体面の略中心とを直線で結んだときの軸に関して断面形状が非対称であり、かつ交線から最も遠い部分と、交線から最も近い部分とについて、遠い部分から近い部分に向うにつれて直交面上の断面形状の寸法が縮小又は拡大するレンズ要素(52、53)を含むレンズ群(50)を有する。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境
【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
作業位置誘導装置及びその誘導方法
【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
光学計測装置
【課題】本発明は、ヘッド部を大型化することなく、コントローラ部に対してヘッド部を交換することが可能なように互換性を持たせることができる光学計測装置を提供する。
【解決手段】本発明に従った光学計測装置では、計測対象物200に対して光を用いて計測を行ない、ヘッド部10と、コントローラ部20と、光ファイバ11と、記憶部40とを備えている。本発明に従った光学計測装置では、ヘッド部10とコントローラ部20とを光ファイバ11で接続する。記憶部40は、製造されるヘッド部10のそれぞれの個体に対して関係付けられ、コントローラ部20で行なう演算に必要な情報をヘッド部10の個体情報として記憶する。コントローラ部20は、コントローラ部20に対して物理的に独立して存在する記憶部40から個体情報を読出し、読出した個体情報を用いて演算を行なう。
(もっと読む)
位置ずれマップ作成装置、パターン検査システム、及び位置ずれマップ作成方法
【課題】被検査試料に形成されたパターンの位置ずれマップを高精度に作成する装置を提供する。
【解決手段】位置ずれマップ作成装置200は、被検査試料から取得された光学画像と参照画像との間での位置ずれ量に基づいた位置ずれマップ(1)に対し、ワイドパスフィルタ処理をおこなって位置ずれマップBを作成するWPフィルタ処理部56と、ローパスフィルタ処理をおこなって位置ずれ量マップCを作成するLPフィルタ処理部58と、座標計測装置で計測された複数の位置計測用パターンの各パターンの位置の位置ずれ量に基づく位置ずれマップ(2)に対し、LPフィルタ処理をおこなって位置ずれマップCを作成するLPフィルタ処理部64と、位置ずれマップAと位置ずれマップBの差分に位置ずれマップCを加算することによって合成して位置ずれマップDを作成する合成部66と、を備える。
(もっと読む)
裁断対象検査装置、裁断対象検査方法、裁断対象検査装置用のプログラム、および、裁断対象検査システム
【課題】多段積みされた裁断対象を精度良く検査できる裁断対象検査装置等を提供する。
【解決手段】多段積みされた裁断対象Bkを検査する裁断対象検査装置において、所定形状のレーザ光L1、L2が投影された裁断対象の画像データを取得し(S7)、画像データからレーザ光が投影された部分の画像を抽出し、抽出されたレーザ光の画像からレーザ光の投影形状の情報を算出し(S8)、所定形状の情報と投影形状の情報とに基づき、多段積みされた裁断対象の良否を判定する(S11)。
(もっと読む)
研削工具の砥面検査システム及び方法
【課題】砥粒の状態を新たな解析パラメータを用いてより詳しく解析し、これにより砥面の状態をさらに正確に検査できるようにする。
【解決手段】カメラ6により砥石3の砥面を撮像してそのライン画像データを取り込み、各ライン画像データに対し砥粒抽出処理部123により複数種のフィルタリング処理を行うことで上記ライン画像データから砥粒切れ刃候補の画像を抽出する。そして、砥粒解析処理部124の制御の下で、上記抽出された各砥粒切れ刃候補の画像から、砥面全域における各砥粒切れ刃候補の重心の座標と、凸多角形近似データ及び円形度と、内部欠損及び外部欠損と、面積及び欠損度と、すくい角側の稜線形状をそれぞれ算出または検出する。そして、この得られた解析パラメータをもとに、砥石3の幅方向における砥粒分布ヒストグラムと、砥石3の砥面全域における砥粒の分布状態を表す三次元マップを生成する。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
膜厚の検査装置および検査方法
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
形状測定装置
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
ウエハの特性決定のための方法とシステム
【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】撮像部の姿勢の容易な調整を可能とする。
【解決手段】ワークの搬送路の少なくとも一部を撮像視野に含むように配置された撮像部110から、撮像によって得られた撮像画像を受理する画像処理装置であって、搬送路上に置かれた目標物を、撮像部110が撮像することによって取得された撮像画像を受理する画像受理手段と、受理された撮像画像における目標物の位置を取得する位置取得手段と、位置取得手段によって取得された目標物の撮像画像における位置を用いて、撮像部110の撮像視野を含む面の、目標物が置かれた面に対する傾き度を取得する傾き取得手段と、取得される傾き度を用いて、撮像部110の姿勢調整を支援するための支援情報を出力する出力手段と、を備える。
(もっと読む)
携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する方法
【課題】携帯端末機に備えられたカメラを利用した物体の実際の大きさを測定する。定規で測るなどの不便を解消し、迅速且つ簡便に物体の正確な実際大きさを測定する。
【解決手段】携帯端末機に備えられたカメラを利用して撮影された物体イメージの大きさ及び物体とカメラとの間の距離を測定し、焦点距離などのカメラの特性と測定された値を利用して撮影された物体の実際大きさを算出する。手順は、(1)携帯端末機に備えられたカメラを利用して撮影された物体イメージを認識する段階と、(2)前記段階(1)で認識された物体イメージの大きさを測定する段階と、(3)前記物体と前記カメラとの間の距離を測定する段階と、(4)前記カメラの特性、前記段階(2)で測定された物体イメージの大きさ、及び前記段階(3)で測定された前記物体と前記カメラとの間の距離を利用して前記物体の実際大きさを算出する。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
タイヤトレッド面の断面形状ならびにトレッド溝の深さを測定する測定装置。
【課題】タイヤのトレッド面の断面形状とトレッド溝の深さを非接触で高速で測定する装置
【解決手段】この発明は、タイヤのトレッド面の断面形状を測定して、測定結果からトレッド溝の深さを計測する装置であり、タイヤのトレッド面近くに幅方向に並置するガイド機構と、トレッド面を単一光で照射する光源装置と、単一光の反射輝点を撮影するデジタルカメラと、光源装置並びにデジタルカメラをガイド機構に沿って移動させながら反射輝点を撮影する制御装置と撮影された画像データからトレッド面断面形状とトレッド溝の深さを測定する手段を備えたことを特徴とする。
(もっと読む)
真直度測定装置
【課題】ストレートエッジと同等の精度で真直度の測定、調整ができる小型軽量安価な真直度測定装置の提供。
【解決手段】光位置センサ7が、測定対象12に沿って摺動させられつつ、光ビーム出力部1からの光ビームを受光した平面上の位置を検出することにより、測定対象12の真直度を測定する真直度測定装置。光ビーム出力部1及び光位置センサ7間の距離を距離センサ6が測定し、受光する平面上の任意の位置を基準位置として受付け、校正動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差を、位置の検出時に距離センサ6が測定した距離と共に記憶しておき、測定動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差から、位置の検出時に測定した距離に対応して記憶している差を差引いた結果を距離と共に表示部11に表示する構成である。
(もっと読む)
1 - 20 / 125
[ Back to top ]