
Fターム[2F065UU01]の内容
光学的手段による測長装置 (194,290) | 特に重要な点 (2,939) | 投光系 (317)
Fターム[2F065UU01]に分類される特許
1 - 20 / 317
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
3次元計測装置およびそれに用いられる照明装置

【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
LED照明を用いた観察装置、膜厚むら検出装置並びに膜厚むら検出装置付塗布装置
【課題】 発光ダイオードを多数配列した面照明を使用した場合であっても、LEDの全点灯までの時間遅れの影響を受けることなく、検査時の照明光量を一定に保ちつつ、短時間で検査を行うことができる、膜厚むらの検出装置並びに当該装置を具備した塗布装置を提供する。
【解決手段】 基板上に形成された皮膜の膜厚むらを検出する装置で、
基板保持部と、光源部と、撮像部と、制御部と、検査部とを備え、
光源部は複数の発光ダイオードを配置して構成された面照明であり、
制御部は、発光指令信号を出力してから複数の発光ダイオードが全点灯状態になるまでの点灯遅れ時間を登録する点灯遅れ時間登録部と、発光指令信号を入力してから登録された点灯遅れ時間経過後に、撮像部に対して撮像指令信号の出力を行う撮像ディレイタイマ部とを備えたことを特徴とする、膜厚むら検出装置。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
位置検出装置および露光装置
【課題】波長差に起因する計測誤差を低減して高精度な位置検出を行う位置検出装置を提供する。
【解決手段】基準マークSMを利用して被検出体WMの位置を検出する位置検出装置であって、第1の波長帯域を有する計測光を用いて被検出体WMを照明する第1の照明光学系5と、第2の波長帯域を有する基準光を用いて基準マークSMを照明する第2の照明光学系13と、被検出体WMからの光束および基準マークSMからの光束を検出する検出光学系10と、検出光学系10で検出された光束に基づいて被検出体WMの位置を検出する位置検出部48とを有し、基準光の第2の波長帯域は、計測光の第1の波長帯域の上限と下限との間に設定されている。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
計測装置
【課題】簡易な構成で参照面と被検面との間の絶対距離を高精度かつ高速に計測可能な計測装置を提供すること
【解決手段】波長走査干渉計は、複数の光源IL1〜IL3と、複数の光束を合成するビームスプリッタ103bと、ビームスプリッタ103bからの光を参照光束と被検光束に分割し、干渉計ユニット300によって検出された干渉信号に基づいて参照面と被検面との間の絶対距離を決定する処理部107と、を有する。干渉計ユニットは、複数の種類の光束に対応する複数の種類の干渉縞のそれぞれを、合成された干渉信号S100として検出する単一の光検出部106を有し、処理部は、合成された干渉信号に対してFFTを行って複数の種類の光束のそれぞれについて絶対距離L1〜L3を取得し、取得した複数の絶対距離を演算して一つの絶対距離L4を出力する。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
溶接位置の検査方法及びその装置
【課題】
簡単な構成を用いて検査範囲の照度を均一化して検査領域を広範囲とし、溶接部の円形輪郭の全周を抽出し高精度に溶接部の位置を検出することで、所望の位置に溶接が施されているかを検査すること。
【解決手段】
本発明は、上記課題を解決するために、検査対象表面の2次元検査領域に対して傾斜した角度で異なる少なくとも2方向から前記2次元検査領域を照明すると共に、該2次元検査領域に対向した位置から前記異なる少なくとも2方向から照明された複数の画像を取得し、該複数の取得した画像から溶接部のくぼみ傾斜部分に対応する輪郭情報をそれぞれ抽出し、該抽出した複数の輪郭情報を合成することで円形の輪郭を得、該円形の輪郭に円を当てはめて前記溶接部として認識し、該溶接部として認識した円の中心座標を溶接位置とすることを特徴とする。
(もっと読む)
3次元形状測定装置
【課題】3次元形状測定装置を提供すること。
【解決手段】3次元形状測定装置は、光を発生する光源ユニットおよび光源ユニットから発生された光を格子パターンを有する格子パターン光に変更する格子ユニットを含み、格子パターン光を所定方向から測定対象物に照射する照明部、および格子ユニットを格子パターンの延長方向および格子パターンの配置方向に対して所定の傾斜方向に移送させる格子移送ユニットを含む。よって、製造コストを低減して、3次元形状測定装置は容易に管理することができる。
(もっと読む)
形状計測装置、形状計測装置の制御方法、およびプログラム
【課題】物体の反射特性によらずに高精度に形状計測ができ、また計測精度の調整が可能な光学的走査による高速な形状計測装置を提供する。
【解決手段】形状計測装置100は、スリット光1により物体を走査する光学走査手段10と、物体からの、スリット光1の反射光による計測画像を取得する撮像手段20と、取得した計測画像を基に、物体の反射位置を算出する反射位置検出手段30と、を備え、反射位置検出手段30は、取得した計測画像を構成する複数の画素に分布する計測輝度パターンから、物体の反射位置候補座標を算出し、計測輝度パターンと、反射位置候補座標を含む比較座標範囲内において所定の分解能の間隔で用意された複数の参照輝度パターンとを比較して、計測輝度パターンとそれぞれの参照輝度パターンとのパターン類似度を算出し、パターン類似度が最も大きな参照輝度パターンが特定する座標情報から、物体の反射位置座標を求める。
(もっと読む)
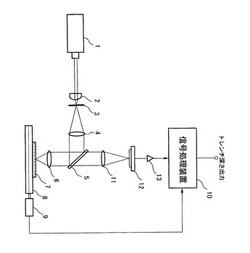
地盤変位測定機構を用いた警報発生装置
【課題】地盤変位の測定に於いて拡散レーザ光を用い、レーザ光の単位面積当たりの光量を減少し、人、動物への眼に対する影響を減少する。また、雨、霧、雪等の影響を少なくした観測を可能とする。また、地盤変位の発生が予測される位置への設置作業を迅速にし作業者の安全性を確保できる。また、測定機構により測定した位相のズレが一定の許容範囲を超えたときに警報発生機構によって警報を発生させる。
【解決手段】照射先のビーム直径を照射元のビーム直径よりも大きくした拡散レーザ光4を発振するレーザ光発振部1と、地盤変位の発生予測位置に設置するレーザ光反射板6と、反射される反射波7を受光する検出器8と、この検出器8によって受光した反射波7とレーザ光発振部1の照射波10の位相のズレからレーザ光発振部1とレーザ光反射板6の距離を計測する測定機構11と、位相のズレが設置時における基準値の許容範囲を超えたときに警報を発生させる警報発生機構14とから成るものである。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
光学式曲がり測定装置
【課題】複数本の光ファイバーを設置し難い測定対象に対しても適用でき、測定対象の複数個所の特定方向の曲がり量を独立に測定し得る光学式曲がり測定装置を提供する。
【解決手段】光学式曲がり測定装置は、測定光を供給する光源ユニット110と、測定光を伝達する光ファイバー120と、光ファイバー120の異なる複数の部分に設けられた複数の光学特性変化部材150A,150B,150Cと、光ファイバー120から出力される光を検出する光検出ユニット140を備えている。各光学特性変化部材150A,150B,150Cは、これが設けられた光ファイバー120の部分の特定方向の曲がり量に応じてこれに入射した光に光学特性の変化を与える。光検出ユニット140は、光学特性の変化を受けた光を分離して検出し、その検出光強度に基づいて光ファイバー120の複数の部分の特定方向の曲がり量を独立に測定する。
(もっと読む)
形状測定装置
【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
1 - 20 / 317
[ Back to top ]