
Fターム[2F067AA04]の内容
波動性又は粒子性放射線を用いた測長装置 (9,092) | 測定内容 (1,524) | 位置、座標 (355) | 3次元 (30)
Fターム[2F067AA04]に分類される特許
1 - 20 / 30
測位システム
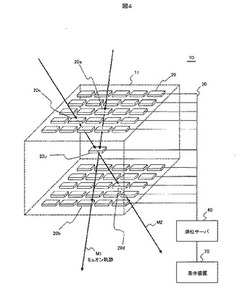
【課題】 電波、光、超音波もしくは音波が遮蔽、反射、回折、屈折しうる環境においても、測位可能とし、高確度な座標値を算出できる測位システムを提供する。
【解決手段】 有限空間内に,ミュオン検出機能と時計と通信機能を有するノードを多数配置し、そのノードの一部の座標値は既知とした上で,各ノードで検出した飛来イベントの時刻情報をノードIDと共に測位サーバに伝達蓄積する。蓄積された情報と既知のノード座標値を基に、ミュオンの軌跡を算出し、さらにそれを基に可動ノードの座標値を算出する。
(もっと読む)
3次元像測定装置及び3次元像測定方法

【課題】半導体デバイスやデバイスシステムの欠陥箇所や不良箇所を、3次元の電流像を用いて特定することができる3次元像測定装置を提供する。
【解決手段】3次元像測定装置100は、走査信号を走査ミラー23に出力する走査回路24と、第2の対物レンズ25を光軸に沿って移動させ、光軸方向における試料200及び第2の対物レンズ25間の相対距離を変化させる光軸方向移動機構26と、制御信号を光軸方向移動機構26に出力する光軸方向移動制御回路27と、試料200に流れる誘起電流を出力する導電性プローブ31と、走査回路24からの走査信号及び導電性プローブ31からの電流値に基づいて試料200の2次元電流像を構築し、光軸方向移動機構26による各相対距離における各2次元電流像を重ね合わせた3次元電流像を構築する演算部43と、を備える。
(もっと読む)
舗装の内部損傷箇所の非破壊調査方法
【課題】舗装の内部損傷箇所を非破壊で迅速に定量調査できる方法を提供する。
【解決手段】上記課題は、舗装路面Rにおける検出対象領域の全体にわたり所定の間隔で、電磁波レーダーkによる探査を行い、各反射波検出位置40について前記内部損傷で反射した部分を含む又は含まない反射波データ50を取得し、この反射波データ50に基づき、各反射波検出位置40の所定深さにおける反射波強度55を取得し、この反射波強度50が所定の強度しきい値以上となる反射波検出位置40を、内部損傷で反射した部分を含む反射波が検出された内部損傷箇所とし、且つ反射波強度が所定の強度しきい値未満となる反射波検出位置40を、内部損傷で反射した部分を含まない反射波が検出された非内部損傷箇所として、検出対象領域に占める内部損傷箇所の割合を定量化する、ことを特徴とする舗装の内部損傷箇所の非破壊調査方法により解決される。
(もっと読む)
機械的ワークを断層撮影法によって測定するための方法
本方法は機械的ワーク(10)を断層撮影法によって測定するのに役立つ。本方法では前記ワーク(10)と前記ワーク(10)を透過する放射線(24)とが徐々に相対移動される。前記ワーク(10)と前記放射線(24)との相互作用から前記ワーク(10、10’)の各移動位置において前記ワーク(10、10’)の2次元像(50、50’)が結像平面に生成され、前記2次元像(50、50’)から前記ワーク(10)の3次元実像が算出される。前記ワーク(10、10’)の内部に存在する規則的な実構造体(12、12’)の、2つの異なる移動位置において生成される少なくとも2つの前記2次元像(50、50’)から前記2次元像(50、50’)内の高コントラストの移行部で点(52a、52a’、52b、52b’、52c、52c’)が検出され、前記点(52a、52a’、52b、52b’、52c、52c’)の位置から3次元等価体(64)が判定され、前記等価体が所定の公称構造体と比較される。 (もっと読む)
3次元画像化方法およびX線断層像撮影装置
【課題】対象物の断層像にアーチファクトがあっても、それに伴う誤差を生じることなく、正確にポリゴンデータを作成して対象物の3次元画像を正しく表示することのできる3次元画像化方法を提供する。
【解決手段】CT撮影等により得られた対象物の3次元濃度データを、あらかじめ設定されている一律のしきい値Stを用いてポリゴンデータを生成する前に、以下の修正を加えることで、アーチファクト等の影響をなくす。3次元濃度データから、仮のしきい値を用いて輪郭(境界)を抽出してその輪郭上の画素aを順次選択し、その画素aを通り対象物像の略法線方向の軸に沿い、その軸の周辺所定領域の画素の濃度値を積算して得られるプロファイルを作成して微分することによって当該プロファイルのピーク値を求め、そのピーク位置の濃度値Spと上記しきい値Stとの差を算出し、選択された画素aと周辺の画素の濃度値を、しきい値Stに近づくように修正する。
(もっと読む)
X線透視による3次元観測方法およびX線透視装置
【課題】X線CT装置を用いることなく、X線透視を行うことにより、アルミダイキャスト部品のボイド等の欠陥をはじめとして、透視対象物内部の特異部位の3次元位置情報を正確に知ることができ、加えて3次元の概略形状を知ることのできるX線透視を用いた3次元観測方法と、その方法を用いたX線透視装置を提供する。
【解決手段】X線源1とX線検出器2の対と透視対象物Wとの相対位置を変化させ張ることにより、透視方向を少なくとも3方向に相違させた透視対象物Wの透視像を取得し、その各透視像上で特異部位の像を抽出し、各透視方向の透視像上で抽出された特異部位の像対応付けした後、各透視方向の透視像上の特異部位の像と、これらの各透視像を得たときのX線源1とX線検出器2の透視対象物Wに対する相対的な3次元位置情報を用いて、特異部位の3次元位置および/または3次元形状を算出し、表示する。
(もっと読む)
組立品の検査方法及び検査システム
【課題】短時間に組立品を構成する各部品間の3次元的位置関係を求めて、被検査体である組立品の内部状態の検査を行う検査システムを提供する。
【解決手段】設計データを格納し、計算投影図を作成・編集するデータ編集処理部2と、前記計算投影図に基づいて抽出すべき部品の境界近傍の輝度を算出する輝度算出部3と、前記算出した輝度に基づいて当該境界近傍の投影像が鮮明になるように撮影装置5の感度を設定する感度設定部4と、搬送された前記組立品に対して複数の方向の投影像を取得する撮影装置5と、前記投影像を電気信号に変換して実投影図として画像処理を行う画像処理部6と、前記実投影図における部品が、前記データ編集処理部より取得した前記計算投影図の部品の許容範囲内に存在するか否かにより、前記組立品の合否を判定する判定部8とを備えることを特徴とする。
(もっと読む)
X線CT装置
【課題】対象物を適当な姿勢のもとに回転テーブル上に載せてCT撮影を行っても、得られるMPR画像などの直交する3断層像上で比較的簡単な操作を行うことにより、対象物の基準面とCT装置の直交3軸とを沿わせることができ、高精度の寸法・形状計測が可能なX線CT装置を提供する。
【解決手段】CTデータを用いた直交3断層像上で、対象物Wの基準面SR1とすべき面に相当する境界を含む互いに異なる位置の3つ以上の3次元参照領域を設定することにより、その各3次元参照領域中で像の境界を求め、その境界上の代表点A〜Cを決定し、これらの各代表点を通る平面を対象物Wの基準面を表す平面とし、その基準面の方向とCT装置の直交3軸のうちの2軸の方向とが一致するように、CTデータの配列方向もしくは直交3軸側をシフトすることで、基準面に直交する断層像などの表示を可能とする。
(もっと読む)
透過する放射線を用いて計測対象の三次元画像を生成するための方法および計測装置
透過する放射線を使った計測対象の三次元画像の生成方法であって、特に多数の二次元投影画像を考慮した逆投影による方法において、計測対象は、計測装置の計測スペースにおいて透過する放射線により貫通され、その際透過する放射線は計測装置の放射源から発し、計測対象の投影画像の最初のセットが、計測装置の検出装置によって撮影され、その際投影画像は、放射源に対して相対的におよび/または検出装置に対して相対的に様々な計測対象の向きで撮影され、投影画像の最初のセットから、計測対象の最初の三次元画像が再構築され、最初の三次元画像は評価され、場合によっては評価の結果によって、計測対象の位置および/または向きが、放射源に対して相対的におよび/または検出装置に対して相対的に変更され、および/または評価の結果により計測装置の運転方法が、あとに続く計測対象の投影画像の撮影のために調節され、最初の三次元画像の評価の後に、計測対象の投影画像の第二のセットが計測装置の検出装置により撮影される方法に関する。 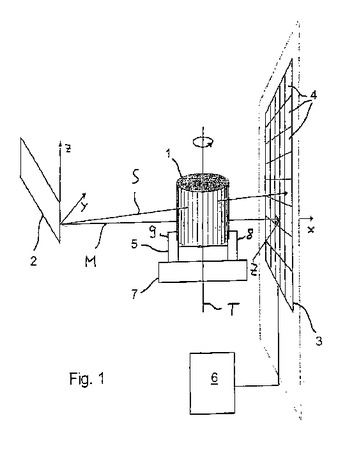 (もっと読む)
(もっと読む)
放射線治療用ベッド位置決めシステム、治療計画装置及びベッド位置決め装置
【課題】ベッド位置決め時の操作者の入力の煩雑さを解消しつつ、ベッド位置決めの精度維持を容易とし、ベッド位置決め時間の短縮化を可能とする。
【解決手段】
治療計画時に計算点をCT画像上にて設定し、設定した計算点の三次元座標値をDRR画像内に設定する。ベッド位置決め装置115はDRR画像を画像サーバ109から読込んだ時点でDRR画像内に設定されている計算点座標値を読み取り、モニタ116にDRR画像と共に表示するとともに、位置決め装置115にDR画像データが読込まれると、モニタ116上にDR画像を表示するとともにDRR画像上に設定されている計算点をDR画像にも設定する。
(もっと読む)
回転視差による材料内部変形の3次元可視化方法及び装置
【課題】 3次元的に塑性変形する複雑形状部品の加工において、加工性の検討や成形品の欠陥の原因を解明するため成形品内部変形の様子を可視化する方法及び装置を提供する。
【解決手段】 標点を埋め込んだ金属材料の変形特性と類似したモデル材料を用いて、前記モデル材料をモデル型に装填し、所定の加工量だけ工具で加圧すると同時に、単一焦点から放射線を照射することにより前記標点を放射線用TVカメラで撮像する。次に、視差を形成するために前記モデル型を放射線用TVカメラの撮像面の縦方向を軸方向とし、モデル型中心軸を軸中心として回転させ、その位置で単一焦点から放射線を照射することにより前記標点を放射線用TVカメラで撮像する。これらの操作を加圧終了まで繰り返した後、撮像画像から標点の2次元座標を演算し、これらの視差を形成する2次元座標から3次元座標を演算し、標点の3次元データとモデル型の形状データとを重ねて表示する。
(もっと読む)
特にコンクリート構造内の鉄筋の検査に適するトモグラフィ決定を改善する方法および配置
特にコンクリート内の棒鋼に適する、放射線を使用したトモグラフィ決定を改善する方法および配置。この方法には、物体を透過性放射線で照射し、前記物体を通過した前記放射線を記録手段に記録し、高密度の放射線吸収材料ででき独立して識別され個別化された複数の基準要素を備え、この基準要素を規則的に配置し、前述の測定を識別し、照射時間を決定し、測定に使用した記録手段に記録された情報に基づいて物体内の対象物の位置および寸法を決定することが含まれる。 (もっと読む)
睡眠姿勢モニタシステムおよび空間位置測定システム
【課題】アクチグラフでは睡眠中の被験者の姿勢まで検出することができない。
【解決手段】被験者の睡眠中の姿勢をモニタする睡眠姿勢モニタシステムであって、被験者の関節位置に配置され、電源を供給されることにより識別IDを発信するRFIDタグ102と、あらかじめ定められた計測時刻に前記RFIDタグ102に電源を供給するとともに、RFIDタグ102から識別IDを受信する複数のアンテナ部101と、識別IDを受信したアンテナ部101での受信電磁場強度を測定する電磁場強度測定部103と、受信された識別IDと、識別IDを受信したアンテナ部101の位置と、アンテナで測定された電磁場強度とから、関節の空間位置を算出し、算出された関節の空間位置に基づいて、被験者の睡眠中の姿勢または姿勢の変化を検出する関節位置算出部109とを備える。
(もっと読む)
散乱中性子線を利用した3次元動体可視化計測方法及びその装置
【課題】
従来の中性子トモグラフィ技術では、金属製容器内の水を直接観察でき、且つその3次元計測も可能であるが、この計測は時間に関する平均量についてのものであるので、対象物質の時間変化が分からず、又そのため時間変化量である速度やその時間変化等の時間変化量が計測できない。
【解決手段】
本発明は、時間平均値である3次元計測データに時間変化を加えた4次元計測データを得るための方法及び装置に関するものであり、前記4次元計測とは、3次元の瞬時値の時間差分から速度等時間変化量を計測するものである。この4次元データを得るために、本発明においては、(1)中性子ビームの散乱現象に着目してビームを複数化し、更に高速中性子を有効利用して熱中性子を増幅する、(2)ビデオカメラで複数の中性子ラジオグラフィ投影像の同時記録をすることが行なわれる。
(もっと読む)
媒質内の物体の計測方法
【課題】鉄筋の設置深度及び直径を電磁波レーダを使用した非破壊的手段で計測する。
【解決手段】電磁波レーダの物理的特性と媒質界面における反射及び屈折を含めた伝播特性に基づく予測受信信号波形を予め作成し、電磁波レーダを測定対象物の表面に沿って走査させて測定した実際の受信信号とのパターンマッチングによって媒質内の物体の位置及び物体の形状、及び媒質の比誘電率を計測するものである。電磁波レーダ2をコンクリート1の表面10にセットし、走査させて反射波を受信し、未知パラメータを設置深さ(d)、鉄筋径(a)、及び比誘電率(ε)として受信信号波形とモデル波形の最適パターンマッチングをおこない、鉄筋のかぶり及び直径を精度よく測定する。
(もっと読む)
3次元形状測定方法および3次元形状測定装置
【課題】製品の3次元的内外面形状を測定し、測定したデータから設計、製造に必要なCADデータを作成し、製品を再現化する3次元形状測定方法および3次元形状測定装置を提供する。
【解決手段】本発明に係る3次元形状測定方法は、対象物の表面形状および内部形状のそれぞれを撮像し(St−1、St−2)、撮像した内部形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する内部形状合成工程(St−3)と、撮像した表面形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する表面形状合成工程(St−4)と、前記内部形状合成工程(St−3)で作成した内部形状合成点群データと前記表面形状合成工程(St−4)で作成した表面形状合成点群データとを合成して一体化する内部表面データ合成工程(St−5)と、この内部表面データ合成工程(St−5)で作成したデータをCADデータに変換する3次元形状変換工程(St−6)とを備える。
(もっと読む)
ケーブルの形状状態測定方法、及びこれに用いるケーブルの形状状態測定システム、ケーブルの形状状態測定プログラム、ケーブル状態評価方法
【課題】 ケーブルの沿線方向の形状状態をより正確に測定するための形状状態測定方法、及びこれに用いるケーブルの形状状態測定システム、ケーブルの形状状態測定プログラム、ケーブル状態評価方法を提供する。
【解決手段】 本発明に係るケーブルの形状状態測定方法は、直交3方向をX,Y,Zとするとき、沿線方向がX−Y平面と交差するように配置された芯線における、X−Y平面と平行かつZ方向に所定間隔で並ぶ複数の芯線断面の断面形状を、X−Y平面の2次元データとして取得する断面形状取得工程と、前記断面形状取得工程により取得される複数の前記断面形状の2次元データから、当該芯線の断面中心を前記複数の芯線断面それぞれについて特定し、前記ピッチ間隔に基づいて、前記複数の芯線断面における前記断面中心を3次元座標値として取得する断面中心座標値取得工程と、前記断面中心座標値取得工程により得られる断面中心の3次元座標値に基づいて、沿線方向の形状状態を数値として出力する形状状態出力工程と、を備えている。
(もっと読む)
モデリング装置、モデリング方法、領域抽出装置、およびプログラム
【課題】高精度のモデリング処理を実現することが可能な技術を提供する。
【解決手段】モデルフィッティング手法を用いて所定の評価関数を最適化するように標準モデルを変形させ、対象物のモデルを生成する。所定の評価関数は、先験的知識項を有する。先験的知識項は、先験的知識に基づき対象物の存在領域として想定される想定領域RBに一致するように標準モデルが変形するときに最適化される項である。また、想定領域RBは、例えば、同種の対象物のデータに基づいて得られる当該対象物の存在確率が、所定値よりも高い領域として求められる。
(もっと読む)
構造の3次元表面粗さを測定する方法
【課題】構造の3次元表面粗さを測定する改良された方法を提供すること。
【解決手段】事前に選択された測定距離にわたって事前に選択された間隔において、対象フィーチャの断面または「スライス」の連続をミリングするために、集束イオン・ビームが使用される。各断面が暴露される際、フィーチャの該当寸法を測定するために、走査電子顕微鏡が使用される。次いで、これらの連続「スライス」からのデータは、フィーチャについて3次元表面粗さを決定するために使用される。
(もっと読む)
侵襲性放射を用いて測定対象を検査するための方法及び装置
本発明は、測定対象(1)に侵襲性放射が照射される、測定対象(1)を検査するための方法及び装置に関し、その際、放射線源(3)からの侵襲性放射の相互作用が、放射感受性を有するセンサ装置(6)を用いて検出され、その際、センサ装置(6)の期待検出結果が、測定対象(1)の設定形状寸法を用い、かつ材料特性を用いて算定装置(13)によって算定され、及び/又は期待検出結果が、マスタ部品を寸法測定することによって得られ、該期待検出結果が、センサ装置(6)の実際の検出結果と比較装置(11)によって比較される。 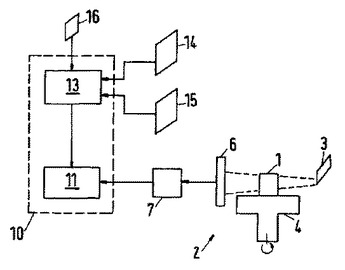 (もっと読む)
(もっと読む)
1 - 20 / 30
[ Back to top ]