
Fターム[2F067KK04]の内容
波動性又は粒子性放射線を用いた測長装置 (9,092) | 利用、言及された現象、測定手法 (908) | 2次電子 (312)
Fターム[2F067KK04]の下位に属するFターム
光電子 (3)
Fターム[2F067KK04]に分類される特許
61 - 80 / 309
荷電粒子線装置に用いられる標準試料,荷電粒子線装置、及び荷電粒子線装置に用いられる標準試料の製造方法
【課題】本発明の目的は、試料を透過した電子を用いて観察するTEMやSTEM、或いはSEMにおいて、画像のサブミクロンから数10μmの微小寸法を高い精度で測定可能にする荷電粒子線用標準試料及びそれを用いる荷電粒子線装置を提供することにある。
【解決手段】本発明では、上記目的を達成するために、倍率、或いは寸法校正のための異なる2つの試料が含まれている荷電粒子線用標準試料及びそれを用いる荷電粒子線装置を提供する。
(もっと読む)
荷電粒子線を用いた試料検査方法および検査装置ならびに欠陥レビュー装置

【課題】周期性のある領域を簡易に且つ精密に設定することが困難であり、検査時に領域に対する位置ずれで誤検出が発生する場合がある。
【解決手段】ストライプ状に電子線画像を連続して取得し、画像の明るさ変化より領域情報を設定あるいは補正することで精密に帯電等の影響も含めた領域情報を設定することができるようになる。
【効果】簡易,短時間に精密に領域を設定でき、領域情報と画像との位置ずれによる誤検出を低減でき、検査結果の信頼性,安定性が向上するため、高感度検査が実現できる。
(もっと読む)
パターン寸法計測方法、パターン寸法計測装置、パターン寸法計測方法をコンピュータに実行させるプログラム及びこれを記録した記録媒体
【課題】
計測対象領域に曲線部分を持つパターンの寸法値を高精度に計測するためには、画像の垂直方向或いは水平方向とパターンの曲線部分における局所的な軌道とがなす角度を算出する必要がある。しかし、パターンエッジを基に該角度を算出した場合、エッジラフネスによりエッジ線の該角度がパターン軌道と異なるケースにおいて、測長精度低下を招く危険があるという課題があった。
【解決手段】
パターンの軌道を示す補助点列から前記角度を算出し、パターン計測を行なう手法を提供することにより、パターンエッジのラフネスの影響を抑制した高精度パターン計測を可能とする。
(もっと読む)
パターン検査装置およびパターン検査方法
【課題】ディスク媒体に同心円状に形成されたトラックのパターンを、回転ステージの回転同期軸振れの影響を受けることなく、適正に検査できるようにする。
【解決手段】本発明のパターン検査装置1は、レジスト膜への電子ビーム照射によりパターン描画されているとともにパターン描画が周方向への回転動作を利用して行われたディスク媒体4のトラックのパターンを検査するものであって、ディスク媒体4が載せられる回転ステージ14と、この回転ステージ14に載せられたディスク媒体4に対して電子ビームを照射する照射光学系2と、この照射光学系2による電子ビームの照射によって回転ステージ14上のディスク媒体4から発生する電子を検出する電子検出器3とを備え、回転ステージ14は、ディスク媒体4にパターン描画するときに当該ディスク媒体を回転動作させるために用いた回転ステージと同一の回転ステージで構成されている。
(もっと読む)
校正用標準部材
【課題】 高精度測長校正を実現する校正用標準部材を提供する。
【解決手段】 光学的回折角測定が可能な回折格子パターンに座標位置を表すマークパターンを混在させ、かつ回折格子配列周囲に十字マークパターンを含んだダミーパターンを配置させることで本標準部材の作製および実現が可能となる。
【効果】 回折格子座標位置を示すマークを回折格子近傍に配置させることにより、校正に用いる回折格子位置の確認が容易になる。また、回折格子配列周囲に十字マークパターンを含んだダミーパターンを配置させることにより回折格子配列内の近接効果の差異の無い均一な回折格子パターンが実現できる。更に、十字マークを回折格子配列に隣接して配置できるので高精度な回折格子位置決めが実現できる標準部材を用いることにより高精度かつ容易な回折格子位置決め校正が可能となり次世代半導体加工に対応した高精度測長校正が実現できる。
(もっと読む)
パターン測定方法、及びパターン測定装置
【課題】設計データと実際のパターン間の位置あわせするための確たる基準がなく、設計データが示す理想パターンに対し、測定対象パターンがどの程度ずれて形成されているのか等、何らかの基準に基づいて、測定することができなかった。
【解決手段】上述のような問題を解決するため、測定個所から離間した位置に形成され、走査電子顕微鏡等によって得られる画像上の基準パターンの位置情報と、設計データに基づいて検出される基準パターンと測定個所の位置関係の情報に基づいて、走査電子顕微鏡等による測定個所の基準位置を設定する。
(もっと読む)
走査電子顕微鏡
【課題】欠陥箇所のフレームが特定可能な、又は保存画像の圧縮率が高い、或いはシステマティックな欠陥を抽出可能な高精度で低ダメージの走査電子顕微鏡を提供する。
【解決手段】走査電子顕微鏡において、パターンの検査・測長のための合成画像を構成する個々のフレーム画像やサブフレーム画像に対してパターンの有無を判定するパターン有無判定部1012や倍率補正部1014、歪曲補正部1018、画像合成部1015及びそれら画像を動画形式で圧縮保存する記憶部1111を備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
パターン評価方法及びパターン評価装置
【課題】SEM画像を利用したパターン計測において、計測対象のパターンに比較的大きな欠陥が含まれている場合でも、基準パターンとのマッチングを高精度に実施することができるパターン評価方法及びパターン評価装置。
【解決手段】基準パターン画像及び計測対象パターン画像から、各パターンの輪郭線を抽出し、抽出した各パターンの輪郭線からパターンのコーナー部分や欠陥部分などに相当するノイズ領域を除去してパターンマッチング用輪郭線を生成する。続いて、基準パターンのパターンマッチング用輪郭線と、計測対象パターンのパターンマッチング用輪郭線とのマッチングを行い、マッチングした位置で元の輪郭線同士を重ね合わせ表示する。そして、その重ね合わせ画像から、基準パターンと計測対象パターンとの差分を計測する。
(もっと読む)
走査荷電粒子顕微鏡を用いた画像生成方法及び装置、並びに試料の観察方法及び観察装置
【課題】
SEMを用いた半導体パターンの画像の取得に関して、SEMの撮像に伴う電子線照射による試料へのダメージを抑えつつ、高分解能なSEM画像を取得することである。
【解決手段】
電子線の照射エネルギーを抑えて撮像した低分解能なSEM画像から形状が類似するパターンを持つ領域(類似領域)を複数抽出し、複数の前記領域の画像データから画像復元処理により一枚の高分解能な前記パターンの画像を生成することを特徴とする。また、設計データを用いて前記類似領域および画像復元処理が実行可能となるSEMの撮像位置および撮像範囲を決定することを特徴とする。
(もっと読む)
パターン検査装置および方法
【課題】半導体集積回路の線幅管理用に、CD−SEMが用いられているが、CD−SEMの自動測定機能は1次元対応で、2次元形状は、CD−SEMや他の顕微鏡から取得された画像を使って操作者が手動で検査しているので、この検査工程を自動化する技術を提供する。
【解決手段】「検査対象パターン画像」と検査対象パターンを製造するために使用する「設計データ」を用いるパターン検査装置であって、データから線分もしくは曲線で表現された基準パターン生成部11と、検査対象パターン画像を生成する画像生成装置7と、検査対象パターン画像のエッジを検出し、検査対象パターン画像のエッジと線分もしくは曲線で表現された基準パターンとを比較することにより、検査対象パターンの測定値を得る検査部12と、測定値の分布から、パターンの製造に関するフィードバック情報を取得する出力部13とを備えた。
(もっと読む)
パターン形状評価装置
【課題】ノイズの多い微細ラインパターンのSEM観察像からエッジラフネスの程度を精確かつ迅速に評価するために、計測されるエッジラフネスの指標のうち、装置のランダムノイズの寄与を1枚の画像データをもとに計算する。またエッジラフネス指標の計測値から装置起因のラフネスを差し引いて、パターンに実際に存在するラフネスの程度を計算する。
【解決手段】エッジ位置のゆらぎのうち、ランダムなノイズに起因する量(分散値)は統計的にみて、エッジ位置データをN個平均したときに1/Nに減少する。この性質を利用し、1枚の画像に対してさまざまなパラメータSの値で画像を縦方向に平均化したのち、エッジラフネス指標を求める。エッジラフネス指標のS依存性を分析し、分散値が1/Sに比例する項をノイズ起因とする。
(もっと読む)
パターン測定方法及びコンピュータプログラム
【課題】本発明は、プロセス変動に依らず、高精度な測定,検査条件の設定を可能とする測定,検査条件設定方法、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、異なる製造条件にて形成された複数のパターンについて、荷電粒子線装置を用いた測定を行い、当該複数のパターンの基準寸法と、当該測定結果との差異、或いはばらつきが相対的に小さくなる測定条件を選択する測定条件設定方法、及びコンピュータプログラムを提案する。複数パターンの基準寸法は、原子間力顕微鏡(Atomic Force Microscope:AFM)によって、上記複数のパターンを測定することによって得るようにしても良いし、半導体パターンの設計データにシミュレーションを施すことによって得られるパターンの断面形状等に基づいて求めるようにしても良い。
(もっと読む)
荷電粒子線装置及び荷電粒子線を用いた測長方法
【課題】デバイス試料の傾斜ズレによる測長誤差を最小化する。
【解決手段】測長前に、試料の単結晶部分から回折パターンを取得し、取得された回折パターンに基づいて荷電粒子線に対する試料の傾斜角を補正する。
(もっと読む)
画像比較方法および画像比較プログラム
【目的】本発明は、画像比較方法および画像比較プログラムに関し、実画像上のパターンと元CADデータのパターンとの比較を容易に行うと共に、同じようなパターンの幅のものが複数存在してもその対応関係を実画像上で容易に判別可能にすることを目的とする。
【構成】試料を撮影した実画像からパターンを構成するライン、スペースのエッジを抽出するステップと、抽出したライン、スペースのエッジをもとにライン、スペースの幅、長さのいずれか一方あるいは両者に対応するエッジ間の距離を測定するステップと、測定したライン、スペースのエッジ間の幅および長さのいずれか一方あるいは両方に、実画像のライン、スペースと元のCADデータから生成したCAD画像のライン、スペースとのいずれか一方あるいは両者の比からなる補正係数を演算して補正CAD画像を生成するステップと、生成した補正CAD画像を実画像に重畳して表示するステップとを有する。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 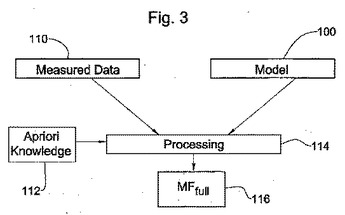 (もっと読む)
(もっと読む)
測定領域検出方法および測定領域検出プログラム
【目的】本発明は、測定領域検出方法および測定領域検出プログラムに関し、画像上である測定領域を指定すると当該測定領域と幅、長さが同じパターンの複数の測定領域を併せて抽出して測定し測定結果を出力することを目的とする。
【構成】CAD画像上で測定場所を指定するステップと、内接する矩形の測定領域(指定)を検出して表示するステップと、検出した測定領域(指定)と幅あるいは長さあるいは両者が同じあるいは所定範囲内で同じ他の測定領域を抽出して測定領域(予測)を生成するステップと、被測定試料からSEM画像を取得するステップと、測定結果を取得するステップと、取得した測定結果をSEM画像上の対応する測定領域(指定)および測定領域(予測)にそれぞれ表示するステップとを有する.
(もっと読む)
測定値の判定方法
【課題】被測定対象物上のパターンの線幅あるいは線間隔などを測定した測定値の良否を判定する測定値の判定方法に関し、画像撮影時の焦点合わせの不良による画像の不明瞭、更にチャージによる画像ドリフトによる画像の不明瞭などによる、パターンの線幅などの測定不良を自動判定する。
【解決手段】被測定対象物上のパターンの信号強度分布を取得するステップと、取得した信号強度分布からパターンのエッジ位置を検出するステップと、エッジ位置の検出に用いたと同一の信号強度分布からパターンのエッジ部分のスロープ値を検出するステップと、検出したスロープ値が予め設定した所定範囲内のときに検出したエッジ位置をもとに算出した測定値が正しいと判定し、一方、所定範囲外のときに検出したエッジ位置をもとに算出した測定値が不良と判定するステップとを有する。
(もっと読む)
パターン評価方法およびプログラム
【課題】簡易な構成で高精度かつ迅速にパターン形状を評価する。
【解決手段】被評価パターンP2の輪郭を検出し、許容値Lが予め与えられた基準パターンであってパターンP2の評価基準となる基準パターンRP2の輪郭を検出し、基準パターンRP2の輪郭と許容値Lに基づいてパターンP2の許容範囲AS2を生成し、検出されたパターンP2の輪郭と許容範囲AS2との相対位置関係を求めることによりパターンP2の輪郭と前記許容範囲との包含関係を判定し、さらに、その判定結果に基づいてパターンP2の良否を判定する。
(もっと読む)
パターン評価システム、パターン評価方法および半導体装置の製造方法
【課題】評価対象パターンの画像を高速で処理するとともに、コンピュータ資源の効率を向上させる。
【解決手段】CD−SEM300により撮像された評価対象パターンの一連の画像Img1〜Imgnを一枚当たりTiの時間で取り込む画像取込装置10と、一連の画像Img1〜Imgnを一枚当たりTpの時間で処理して評価対象パターンの評価結果を出力するクラスタノードCN1〜CNMと、クラスタノードCN1〜CNMが接続されてこれらを制御するメインノードMNを備える分散コンピューティングシステム1において、時間TiおよびTpを測定して一連の画像Img1〜Imgnの取得時間とその処理時間とが一致するように、クラスタノードCN1〜CNm(m≦M)を推定して一連の画像処理に割り当てる。
(もっと読む)
61 - 80 / 309
[ Back to top ]