
Fターム[2F069AA01]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122)
Fターム[2F069AA01]の下位に属するFターム
Fターム[2F069AA01]に分類される特許
1 - 20 / 109
形状評価方法、形状評価装置、プログラム及び記録媒体
スティックスリップ検出装置および検出方法
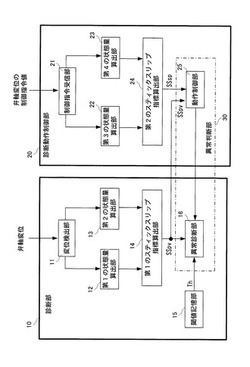
【課題】スティックスリップの誤検出を高精度で抑制する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
(もっと読む)
印字装置および印字方法

【課題】金属コイルを固縛するバンドに跨って印字することなく、固縛後の金属コイルの表面に対して、印字レイアウトの制約を遵守しつつ情報を的確に印字できること。
【解決手段】本発明の一態様にかかる印字装置1は、バンド16によって固縛された金属コイル15に印字する装置であり、検出部2および印字レイアウト決定部8を備える。検出部2は、金属コイル15の印字対象領域の中から、バンド16の位置等を含む印字不可領域と、この印字不可領域以外の印字可能領域とを検出する。印字レイアウト決定部8は、指示された制約を加味した印字レイアウトと印字可能領域との適合度を所定の評価関数によって評価して、この制約を遵守しつつ印字可能領域に文字群を印字できる印字レイアウトの候補を複数選出し、選出した複数の候補のうち、文字群の印字面積が最大となる候補を印字レイアウトとして決定する。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法
【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
計測装置、及び計測方法
【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
情報処理装置および情報処理プログラム
【課題】異常データの影響を低減して、測定領域全体の形状データを高精度に得ることができる情報処理装置を提供する。
【解決手段】本発明の情報処理装置は、形状測定装置により所定領域単位でワークの形状を測定して得られた複数の形状データを取得するデータ取得部と、ワークと形状測定装置との位置姿勢関係を示す位置姿勢情報を取得する情報取得部と、位置姿勢情報に基づいて、各形状データの座標系を共通の座標系に変換する変換部と、共通の座標系における一の形状データの座標を補正して当該形状データが示す領域に隣接する領域の形状データにつなぎ合わせるステッチング処理を行うための補正量を、一の形状データが示す領域と隣接する領域との間で重複する領域の形状データを用いて算出する補正量算出部と、補正量または補正量による補正後の形状データに基づいて、ステッチング処理の信頼度を算出する信頼度算出部と、を有する。
(もっと読む)
形状評価方法、形状評価装置、プログラム及び記録媒体
【課題】輪帯面と壁面とが交互に連続して形成された被測定面であっても、フィッティング精度を向上させることを目的とする。
【解決手段】複数の点データを列毎にグループ化して複数の点列データを生成する(S102)。点列データ毎に走査軌跡面関数をそれぞれ求める(S103)。複数の点データの中から各輪帯面のデータと見做せる点データを各輪帯面に対応して抽出し、得られた抽出データ毎に、その抽出データを関数近似して輪帯面を示す輪帯面関数をそれぞれ求める(S104)。設計データに基づいて壁面関数をそれぞれ求める(S105)。各面関数が交差する各々の交点データを求める(S106)。参照データと交点データとをフィッティングさせる座標変換パラメータを求める(S107)。座標変換パラメータで各点データを座標変換する(S108)。座標変換した点データと被測定面の設計データとの差分を求める(S110)。
(もっと読む)
センサベースのオリエンテーションシステム
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
測定方法、測定装置及びプログラム
【課題】被測定面の形状測定に有利な技術を提供する。
【解決手段】円形外形の被測定面の形状を測定する測定方法であって、被測定面を保持するステージをステージ回転軸を中心として回転させ被測定面の複数の部分領域のそれぞれを測定装置の視野に位置決めし(S304)、部分領域のそれぞれを測定して形状データを取得する取得ステップ(S306)と、部分領域のそれぞれの形状データから被測定面の形状を算出する算出ステップとを有し、輪郭部分領域のそれぞれについて被測定面の中心の位置を求める第1ステップと、被測定面の複数の中心の位置から回転する被測定面の回転の中心である回転軸の位置を求める第2ステップと、第2ステップで求めた回転軸の位置及び複数の部分領域のそれぞれを位置決めする際のステージの回転角度を用いて、複数の部分領域のそれぞれの形状データをつなぎ合わせて被測定面の形状を求める第3ステップ(S314)とを有する。
(もっと読む)
複数の姿勢においてプローブを用いて物体をプロービングすることによってプローブを物体とレジストレーションする方法およびシステム
【課題】複数の姿勢においてプローブを用いて物体をプロービングすることによって、プローブが物体とレジストレーションされる方法を提供する。
【解決手段】プローブ110の各姿勢は、ロケーションおよび向きを含む。プローブ110の現在のロケーションの確率分布が、粒子のセットによって表され201、プローブ110の現在の向きの確率分布が、各粒子について、現在のロケーションを条件とするガウス分布によって表される。候補動作のセットが選ばれ215、各候補動作について、粒子のセットに基づく期待不確実性が求められる220。最小の期待不確実性を有する候補動作が、プローブ110の次の動作として選択され230、プローブ110は、次の動作に従って移動され202、粒子のセットは、プローブ110の次の姿勢を用いて更新される210。
(もっと読む)
接触式プローブおよびその製造方法
【課題】微細な孔内の形状測定が行えるとともに屈曲部分の干渉が回避できる接触式プローブおよびその製造方法を提供すること。
【解決手段】接触式プローブ10は、棒状のステム11と、ステム11に対して交叉方向へ延びるチップ12と、チップ12とステム11とで挟まれた部分に形成された切欠き状のピット13とを有する。ピット13は、ステムのチップが延びる方向の側面の延長線とチップのステムが接合された面の延長線との交点Cよりも深く形成される。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
位置合わせ方法
【課題】精度を損なうことなく位置合わせ処理の計算時間を短縮する。
【解決手段】測定対象を測定機により測定して得られた複数の計測点からなる計測点群と、測定対象の設計データにより特定される複数の設計点からなる設計点群とを演算処理装置によって位置合わせする位置合わせ方法であって、演算処理装置が、計測点群から部分点群を選択し、部分点群と設計点群とを位置合わせ処理して移動パラメータを算出し(S2)、移動パラメータを用いて計測点群を移動させ(S3)、移動後の計測点群と前記設計点群とを位置合わせ処理する(S6)。
(もっと読む)
座標測定機
【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
ガラスフィルムの巻きズレ修正装置およびその巻きズレ修正方法
【課題】ガラスフィルムの巻きズレの多少に関わらず、ガラスフィルムに破断を生じさせることなく、精度よく巻きズレを修正する。
【解決手段】制御部9が、ガラスフィルムGに割れが生じない範囲で、ガラスフィルムGの所定の単位長さ当りの巻出機構2の最大修正量を設定するとともに、ガラスフィルムGの単位長さ毎にズレ量と最大修正量とを比較し、ズレ量が最大修正量以下である場合には、その単位長さ区間でズレ量まで巻出機構2の幅方向位置を修正移動させ、ズレ量が最大修正量を越える場合には、その単位長さ区間で最大修正量まで巻出機構2の幅方向位置を修正移動させる。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
長尺体の直線度を測定する測定方法、携帯型測定用キット
【課題】長尺体の直線度を容易に測定することを考慮した方法を提供すること。
【解決手段】長尺体の直線度を測定する測定方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S2)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S3)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S4)と、を具備することを特徴とする。
(もっと読む)
1 - 20 / 109
[ Back to top ]