
Fターム[2F069AA02]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 1次元 (162)
Fターム[2F069AA02]に分類される特許
1 - 20 / 162
実切込み量測定方法および加工方法および工作機械
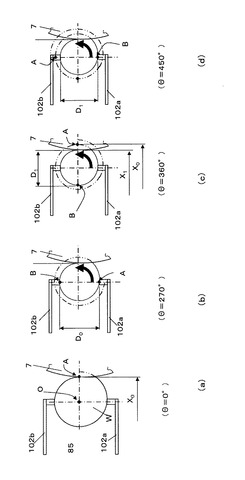
【課題】加工部位の正確な実切込み量を加工中に測定し、これを用いて加工工程を制御する工作機械を提供する。
【解決手段】円筒の加工部を備えた工作物Wを回転支持して砥石車7を半径方向に切込む加工方法において、加工部表面の測定開始点を含む直径である開始直径D0を測定し、測定開始点が加工作用部を通過した後に、測定開始点を含む直径である終了直径D1を測定する。測定開始点が加工された時の実切込み量Uを式U=|D0−D1|を用いて演算し、加工部の回転方向の位置に対応する実切込み量Uの相互差から加工部の振れを演算し、振れを除去するような砥石車7の切込み制御を行う。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法

【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
長さ測定装置
【課題】高い測定精度を備える良好に操作可能で安定した長さ測定機を提供する。
【解決手段】スケール3が中空成形部材4内に保護されるように配設されたカプセル化された長さ測定装置において、基準点を構成するため、固定要素10が設けられ、この固定要素が、一方で、スケールを固定装置10に位置不動に固定し、他方で、測定すべき対象1に位置不動に固定可能であり、固定要素10が、更に、固定要素10を測定方向Xに移動可能に中空成形部材4内に固定する少なくとも1つの長さ補正要素を備え、この少なくとも1つの長さ補正要素が、特に、測定方向Xの補正運動だけを可能にする固体ジョイント131,132の装置の形態に形成されている。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
電極厚さ変化測定装置
【課題】充放電時における正極および負極それぞれの厚さ変化を個別に測定することができる電極厚さ変化測定装置の提供
【解決手段】本発明に係る電極厚さ変化測定装置100は、充放電時における正極または負極の厚さ変化を測定する装置であり、第一硬質平板1と、第一電極2と、測定電極台座3と、第二電極4と、第二硬質平板(電極押さえ)5とを順に積層した積層体を電解質と接触する状態で密閉した電極厚さ変化測定用セル10と、第一電極に荷重を付加する荷重負荷手段11と、第一リード12および第二リード13を介して、電極厚さ変化測定用セル10内の第一電極(図示しない)および第二電極(図示しない)に電気的に接続され、充放電を行う充放電装置14と、第一電極の充放電時の変位を測定する変位計15とを備え、測定電極台座3と第二硬質平板5との間隔は、第二電極4が膨張しても変化しない構成となっている。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
厚さが変動する回転するブレードの位置を測定するシステムおよび方法
【課題】回転するブレード先端部と筐体の間の半径方向クリアランスの正確な測定が可能なシステムおよび方法を提供する。
【解決手段】センサは、複数の既知軸方向位置、ブレードの厚さおよびブレード先端部と筐体の間の機械的に測定された半径方向クリアランスについて回転するブレードに較正が可能である。後の作動で、ブレード通過信号の幅および回転するブレードの速度を測って回転可能なブレードの厚さを測定することが可能であり、回転可能なブレードの厚さは、センサに対する回転するブレードの軸方向位置と関連付けることが可能である。測定された軸方向位置は、それから、回転するブレードと筐体の間の正確な半径方向クリアランスを測定するため、格納されたセンサ較正データと比較される。
(もっと読む)
自動二輪車の緩衝器ストローク検出装置
【課題】簡素でコンパクトな構造で緩衝器のストローク量を精度良く検出させる。
【解決手段】伸縮自在に嵌合したインナーチューブ6及びアウターチューブ5と、これらチューブの内部に配設された油圧緩衝用の作動油11と、伸縮によって容積を変化させる空気室2とを備えた自動二輪車の緩衝器1において、空気室2内に配設されて空気室内の空気圧を検出する圧力検出手段3と、圧力検出手段の検出値から緩衝器のストローク量を換算するストローク量演算手段20とを少なくとも備えたストローク検出装置34を採用する。緩衝器1の所定のストローク位置を検出して補正用の実ストローク量S2を計測するストローク位置検出手段14,15を備える。空気室2内に配設されて空気室内の空気温度を検出する温度検出手段4を備え、圧力検出手段3と温度検出手段4との検出値から緩衝器1のストローク量S1を換算する。
(もっと読む)
印刷位置検出方法
【課題】可撓性シートに対する印刷型の配置が種々である印版を使用して印刷を行う際に、初期段階であっても段ボールシートに印刷される位置を正確に検出することができる、印刷位置検出方法を提供する。
【解決手段】可撓性シート21上の印刷型22の基準点Q3から予め定める所定距離の第一基準点Q1に、印刷型22より高さの低い被検出体30を取り付け、版胴11の回転に伴う被検出体30の通過を第一センサ31によって検出し、挟持点Q0に向かい搬送される段ボールシート1上に第二基準点Q2を設定し、第二基準点Q2の通過を第二センサ32によって検出し、第一センサ31による第一基準点Q1の検出点と挟持点Q0との距離N1、第二センサ32による第二基準点Q2の検出点と挟持点Q0との距離N2、及び、印刷型の基準点Q3と第一基準点Q1との距離に基づき、段ボールシート1において印刷型の基準点に対応する点Q3’を検出する。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具
【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
被加工物の真直度校正方法
【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定し、その測定された真直度の値を校正する方法の提供。
【解決手段】 一対の平面鏡(M1,M2)を距離d離して両端に設けた姿勢表示物体2を1個、変位センサ4を用い、長尺の被測定物(加工ワーク)wを距離dずつ移動さして変位センサ4により被測定物の真直度を測定し、この測定値に含まれる装置の運動誤差誤差を差し引く校正を行うので、短い姿勢表示物体2を用いて長い被測定物の真直度を校正することができる。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
測定装置
【課題】ゴム層内に埋設されたスチールコードの位置を非破壊方式で簡便に測定でき、かつ取り扱いも容易で低コスト化が可能な測定装置を提供する。
【解決手段】基板12の載置面1204をゴム層2の上面に載せ、測定位置基準部1206をゴム層2の端面2aに押し当てた状態で、球体14を案内部1202に沿って測定位置基準部1206から離間する方向に転動させ、球体14が、ゴム層2の端面に最も近接するスチールコードの真上に転動され、スチールコードとの磁気結合によりスチールコードに吸着されて静止した時の位置と測定位置基準部1206との間の距離をスケール18の目盛から読み取る構成にした。
(もっと読む)
振れ測定位置設定方法
【課題】効率的に工具の振れ測定位置を設定することができる振れ測定位置設定方法を提供すること。
【解決手段】振れ測定装置20は、測定範囲DB32により、複数の工具Tのそれぞれにおける振れセンサ21の振れ測定値が要件値となる第1の測定位置から、この振れ測定値が振れセンサ21の測定限界値となる第2の測定位置までの範囲を、この複数の工具Tの取付位置からの距離に対する振れ測定可能範囲Dmとして予め記憶する。また、振れ測定装置20は、距離センサ22により測定された、工具Tの取付位置から先端までの距離と、測定範囲DB32に基づいて、振れセンサ21の工具Tの振れ測定可能範囲Dmを算出し、算出された振れ測定可能範囲Dmに基づいて、振れセンサ21の振れ測定位置を設定する。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
電線弛度測定方法および装置
【課題】プレハブ架線工法によって敷設された電線の弛度測定を容易にし、電線の弛度測定に要する労力を大幅に軽減することが可能な電線弛度測定方法および装置を提供する。
【解決手段】一方のポストと他方のポストとのそれぞれに電線の設計弛度を示す基準点を設け、一方のポスト基準点に、上下方向に延び他方のポストの基準点と電線の弛みの最下点を観測可能な高さ水準観測器20が昇降可能に取付けられる目盛り2f付きのスライド用レール2を固定し、高さ水準観測器20を水平方向に回動させることにより高さ水準観測器20の照準と電線の弛みの最下点との位置関係を比較し、照準が電線の最下点に合致していない場合は、高さ水準観測器20を昇降させて照準を電線の弛みの最下点に合致させ、照準と電線の最下点が合致した際の高さ水準観測器20の昇降量をスライド用レール2の目盛り2fによって読取る。
(もっと読む)
測定方法及び形状測定装置
【課題】センサ1本だけを用いた繰返し走査型の2点法で高い測定精度を実現する新しい測定方法及び形状測定装置を提供する。
【解決手段】回転ガイドRGの周囲を走査用回転部SRを相対回転させ、それと共にセンサS1が被測定対象OBの周囲を回転し外周の凹凸を検出するので、変位センサS1の出力が不図示のエンコーダの信号に同期して出力される。回転軸線Xの交差位置を変えずに被測定対象OBと検出部保持台BSとを走査方向に所定の角度だけ回転変位させる。回転ガイドRGの周囲を、走査用回転部SRを相対回転させるとそれと共にセンサS1が被測定対象OBの周囲を回転し、その出力を取得することで(4)ー(6)式が求められ被測定対象OBの形状だけを求める差分が得られる。
m1(θ)=f(θ)+ex(θ)(4)、m2(θ)=f(θ+φ)+ex(θ)(5)、m2(θ)−m1(θ)=f(θ+φ)−f(θ)(6)
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
1 - 20 / 162
[ Back to top ]