
Fターム[2F069AA03]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 2次元 (133)
Fターム[2F069AA03]に分類される特許
1 - 20 / 133
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
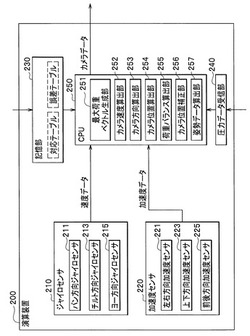
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
タイヤの変位測定器

【課題】取り付けが容易で、一般的な使用環境でも測定し得るタイヤの変位測定器の提供。
【解決手段】変位測定器2は、タイヤのコードの変位を測定する軸方向距離センサ14と、この軸方向距離センサ14が固定される固定台6と、この固定台6から突出してタイヤ24に差し込まれる取付ピン10、12とを備えている。好ましくは、この測定器2は、ストッパ13を備えている。このストッパ13は、上記取付ピン10、12のいずれかに取り付けられている。このストッパ13は、取付ピン10、12の先端と固定台6との間に位置している。好ましくは、この測定器2は、上記固定台6とタイヤ24との間に空間が形成されてタイヤ24に取り付けられる。好ましくは、上記軸方向距離センサ14は、タイヤ24の屈曲点を通るタイヤ軸線に平行な直線上に位置させられてタイヤ24に取り付けられる。
(もっと読む)
多点検査装置と方法
【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
位置検出装置
【課題】外部電源が不要な位置検出装置を提供する。
【解決手段】本発明の位置検出装置は、磁化を有する磁性体層と、この磁性体層上に形成されスピン軌道相互作用を有する材料を含む導電パターン膜と、を含む。導体パターン膜は、磁性体層の磁化方向に交差する方向に延在し、かつ互いに平面上で交差する複数本の導体線からなる。磁性体層の任意の箇所が加熱又は冷却されることにより、磁性体層中の温度を変調し、スピンゼーベック効果を誘起することで、導電パターン膜中に電場を発生させ、それに伴う電位変化から温度変調の2次元位置と大きさの情報を推定可能である。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
3次元測定方法
【課題】 被測定物の形状を高精度で測定する3次元測定方法を提供する。
【解決手段】 ウエーハ上のアライメントマーク29の高さに合わせて、カメラ8のフォーカス高さをZ2軸ステージ9により調整する。このフォーカス高さに合わせて校正用アライメントマーク10の高さをZ3軸ステージ11により調整する。この状態で、校正用アライメントマーク10の中心位置を、カメラ8とプローブ1にて測定し、この2つのカメラ8とプローブ9の距離オフセット(Xo,Yo)を高精度に求める。このオフセットを用いて、カメラ8で測定したウエーハ上のアライメントマーク29の座標を、プローブ1の座標系に高精度に変換する。プローブ9でウエーハ上のレンズを測定すれば、ウエーハ上のアライメントマーク29位置を基準で高精度にレンズ中心を求めることができる。
(もっと読む)
厚さが変動する回転するブレードの位置を測定するシステムおよび方法
【課題】回転するブレード先端部と筐体の間の半径方向クリアランスの正確な測定が可能なシステムおよび方法を提供する。
【解決手段】センサは、複数の既知軸方向位置、ブレードの厚さおよびブレード先端部と筐体の間の機械的に測定された半径方向クリアランスについて回転するブレードに較正が可能である。後の作動で、ブレード通過信号の幅および回転するブレードの速度を測って回転可能なブレードの厚さを測定することが可能であり、回転可能なブレードの厚さは、センサに対する回転するブレードの軸方向位置と関連付けることが可能である。測定された軸方向位置は、それから、回転するブレードと筐体の間の正確な半径方向クリアランスを測定するため、格納されたセンサ較正データと比較される。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 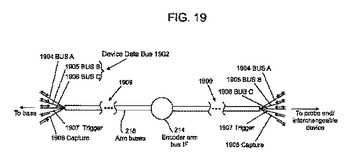 (もっと読む)
(もっと読む)
保持体に固定された物差しを備える配列装置
【課題】物差しが保持体に安定且つ偏差なしに保持され、保持体に固定された物差しを備える配列装置を提供すること。
【解決手段】この発明によると、物差し(1)が球(3)の二次元的配列によって保持体(2)に固定される。球(3)が一方で直接に保持体(2)に載置し、他方で物差し(1)が直接に球(3)上に載置する。保持体(2)と物差し(1)の間の保持力は、保持体(2)に球(3)の固定式保持によって或いは物差し(1)に球(3)の固定式保持によって保証される。球(3)の配列は、それらの球の間に自由空間(4)が残留し、その自由空間が外方に案内する通路を形成するようになる。
(もっと読む)
塗装膜厚測定装置
【課題】被塗装面の領域内において、膜厚を測定するための特定位置に簡単に膜厚センサを位置づけることができる膜厚測定装置を提供する。
【解決手段】塗装膜厚測定装置10は、被塗装面に施された塗装の膜厚を測定する膜厚センサ15と、被塗装面の領域内において、膜厚センサによる測定位置を標定する距離センサ12とを備える。また、塗装膜厚測定装置10は、被塗装面の領域内に設定された特定位置を記憶する記憶部22と、記憶部22に記憶された特定位置と距離センサ12によって標定された測定位置とを比較し、両者の差分を求める比較部24と、比較部24によって求められた差分を通知する通知部20と、をさらに備えることができる。
(もっと読む)
回転軸の測定装置
【課題】2つのセンサを設けずにクラッチを組み付けた状態で駆動軸と被駆動軸の芯ずれを測定することができるとともに、作業性を向上することができる回転軸の測定装置を提供する。
【解決手段】回転軸の測定装置10は、駆動軸と被駆動軸の芯ずれをフライホイール61上で測定するセンサヘッド20と、センサヘッド20の測定データを処理するデータ処理装置40と、を備え、センサヘッド20は、被駆動軸に設けられたスプライン軸部の外周の周方向変位を検出する平面コイルを有する変位センサ21を備え、変位センサ21は、平面コイルからスプライン軸部の外周までの距離に起因する第1信号成分と、スプライン軸部の外周の凹凸形状に起因する第2信号成分とが重畳された電気信号を出力し、データ処理装置40は、第1信号成分および第2信号成分に基づいて芯ずれ量および芯ずれ位相の情報を取得する構成を有する。
(もっと読む)
組付部の位置算出方法、及び、組付部の位置算出システム
【課題】部品を組付けた状態や完成車の状態で組付部が内部に隠れていたり、ボデーや他の部品によって遮られていたりする場合でも、前記組付部の実際の位置を定量的に把握することにより、前記部品の組付精度を簡易かつ迅速に計測することができる、組付部の位置算出方法、及び、組付部の位置算出システムを提供する。
【解決手段】本発明に係る組付部の位置算出方法は、各部品の連結前における外形形状をそれぞれ測定する第一測定工程と、組付構造の連結部の外形形状を測定する第二測定工程と、第一外形データ51及び第二外形データ52と、連結部外形データ53とのそれぞれの外形線が重なるように位置合わせを行う整合工程と、設計データ61と、組付構造外形データ54との、それぞれの外形線が重なるように位置合わせを行う位置算出工程と、を備える。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
1 - 20 / 133
[ Back to top ]