
Fターム[2F069AA06]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 変位;移動量 (182)
Fターム[2F069AA06]に分類される特許
1 - 20 / 182
電子機器
入力判別装置
状態検出装置、電子機器及びプログラム
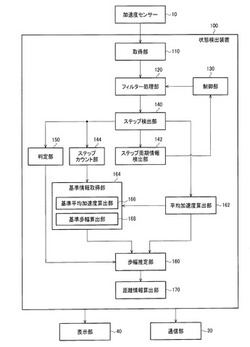
【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
実切込み量測定方法および加工方法および工作機械

【課題】加工部位の正確な実切込み量を加工中に測定し、これを用いて加工工程を制御する工作機械を提供する。
【解決手段】円筒の加工部を備えた工作物Wを回転支持して砥石車7を半径方向に切込む加工方法において、加工部表面の測定開始点を含む直径である開始直径D0を測定し、測定開始点が加工作用部を通過した後に、測定開始点を含む直径である終了直径D1を測定する。測定開始点が加工された時の実切込み量Uを式U=|D0−D1|を用いて演算し、加工部の回転方向の位置に対応する実切込み量Uの相互差から加工部の振れを演算し、振れを除去するような砥石車7の切込み制御を行う。
(もっと読む)
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
タイヤの変位測定器
【課題】取り付けが容易で、一般的な使用環境でも測定し得るタイヤの変位測定器の提供。
【解決手段】変位測定器2は、タイヤのコードの変位を測定する軸方向距離センサ14と、この軸方向距離センサ14が固定される固定台6と、この固定台6から突出してタイヤ24に差し込まれる取付ピン10、12とを備えている。好ましくは、この測定器2は、ストッパ13を備えている。このストッパ13は、上記取付ピン10、12のいずれかに取り付けられている。このストッパ13は、取付ピン10、12の先端と固定台6との間に位置している。好ましくは、この測定器2は、上記固定台6とタイヤ24との間に空間が形成されてタイヤ24に取り付けられる。好ましくは、上記軸方向距離センサ14は、タイヤ24の屈曲点を通るタイヤ軸線に平行な直線上に位置させられてタイヤ24に取り付けられる。
(もっと読む)
長尺材の変位量測定装置
【課題】長尺材のうねり(変位量)を簡易かつ正確に測定することができる長尺材の変位量測定装置を提供する。
【解決手段】変位量測定装置は、定速走行部1と、架台2と、加速度計3と、記録計4とを備える。定速走行部1は、上下方向に伸びる長尺材(ガイドレールR)に沿って定速で走行する。架台2は、この定速走行部1と共に長尺材に沿って移動される。加速度計3は、架台2の平面方向の加速度を計測する加速度計であって、長尺材のうねりに応じて傾いた架台2の平面方向に生じる重力の加速度成分を計測する。記録計4は、加速度計3の計測結果を記録する。この計測結果と定速走行部1の走行速度とを利用することで、長尺体の変位量を演算により求めることができる。
(もっと読む)
有関節座標計測機再配置方法
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
センサベースのオリエンテーションシステム
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
レール測定器具及び測定方法
【課題】レールの上下方向及び左右方向の偏位を一人で測定できるとともに、曲線状のレール部分においても測定することができるレール測定器具及びレール測定方法を提供する。
【解決手段】レール測定器具1は、レールRの上にレールRの延在する方向に離間して固定される一対のレール固定部材2と、一対のレール固定部材2を互いに引張状態で連結する測定部材3とを備え、レール固定部材2は、一方の端部と他方の端部とが端部間方向に向けて配置され、測定部材係止用の溝部21又は孔部が設けられた基台11と、基台11をレールRに固定する固定手段31とを有し、測定部材3は、溝部21又は孔部に挿入され、且つ挿入された位置への係止部71を有する一対のピン61と、これら一対のピン61間に連結された線状体81とを有することを特徴とする。
(もっと読む)
電極厚さ変化測定装置
【課題】充放電時における正極および負極それぞれの厚さ変化を個別に測定することができる電極厚さ変化測定装置の提供
【解決手段】本発明に係る電極厚さ変化測定装置100は、充放電時における正極または負極の厚さ変化を測定する装置であり、第一硬質平板1と、第一電極2と、測定電極台座3と、第二電極4と、第二硬質平板(電極押さえ)5とを順に積層した積層体を電解質と接触する状態で密閉した電極厚さ変化測定用セル10と、第一電極に荷重を付加する荷重負荷手段11と、第一リード12および第二リード13を介して、電極厚さ変化測定用セル10内の第一電極(図示しない)および第二電極(図示しない)に電気的に接続され、充放電を行う充放電装置14と、第一電極の充放電時の変位を測定する変位計15とを備え、測定電極台座3と第二硬質平板5との間隔は、第二電極4が膨張しても変化しない構成となっている。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
センサを位置決めするためのシステム及び方法
【課題】互いに対して移動できる複数の障壁部を通過するセンサを位置決めするシステム及び方法を提供する。
【解決手段】内側障壁部14及び外側障壁部16を通ってセンサ12を位置決めするシステム10は、内側又は外側障壁部14、16と係合するよう構成された第1のカラー18と、折り畳み可能カップリング32と、折り畳み可能カップリング32に接続されたセンサ支持部22と、を含む。折り畳み可能カップリング32又はセンサ支持部22は、第1のカラー18とシール係合しており、第1のカラー18、折り畳み可能カップリング32、及びセンサ支持部22が通路を画成する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
地震スクラム方法及びその装置
【課題】原子炉建屋と隣接建屋又は原子炉建屋と周辺地盤との間に発生する相対変位を計測することにより、原子炉を自動停止し、想定を超える地震に遭遇しても原子炉を安全に停止することができる地震スクラム方法及びその装置を提供する。
【解決手段】地震スクラム方法は、原子炉建屋2とこの原子炉建屋2に隣接する建屋であるタービン建屋3との相対変位又はこの原子炉建屋2に隣接する周辺地盤2aとの相対変位を計測する相対変位計測ステップと、この計測ステップにより出力された変位データが予め定められた閾値を超えるときに原子炉を自動停止するスクラム信号を出力するスクラム信号出力ステップと、を有する。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の非円形部2Dは、ステアリングシャフト方向、すなわち、回転軸方向から見て回転軸の周りに非円形を呈している。操舵角検出装置10は、ステアリングホイール2の非円形部2Dの回転軸の半径方向における変位量と、ステアリングホイール2の回転方向とを検出すると共に、変位量と操舵角とを対応付けたデータテーブルから操舵角を特定して出力すると共に、操舵角の特定は、検出された変位量と、直近の操舵角と、ステアリングホイール2の回転方向とに基づいて行う。
(もっと読む)
回転装置の回転角度測定装置及び回転角度測定方法
【課題】加工装置の回転装置の回転角度を容易に精度よく測定することができるとともに、測定時間の短縮と作業コストの削減を可能にする回転装置の回転角度測定装置及び回転角度測定方法を提供することを目的としている。
【解決手段】回転角度測定装置1は、加工装置のテーブル2の上に設けられたエンコーダ取付台3と、このエンコーダ取付台3に載置されたエンコーダ4と、エンコーダ4に取り付けられたVブロック取付台5上に載置されたVブロック6と、回転装置7に取り付けられたボールプランジャ取付台8に設置されたボールプランジャ9、偏芯変位計10及び偏角変位計11と、回転角度指令装置12(加工機の制御装置)から回転装置7に指令された回転角度を検出する検出部13と、エンコーダ4、偏芯変位計10、偏角変位計11及び検出部13からの出力信号を処理する演算装置14とで構成されている。
(もっと読む)
斜面安定化システム
【課題】現斜面の状況に応じて簡易な対策工を施して、斜面崩壊の発生の恐れを僅かでも少なくするとともに、斜面崩壊が発生した場合の被害を最小限にとどめることを可能にし、また、斜面崩壊の可能性が高まった時に住民が適切な対応をすることを可能にする斜面安定化システムを提供する。
【解決手段】土塊の移動に伴って抵抗力を発揮して斜面の不安定な土塊の移動の程度を小さくすることが可能な斜面安定化構造体を斜面に施工する。この場合、1.0超、1.2未満の安全率Fsにて施工する。斜面安定化構造体を構成する斜面安定化部材体に変位センサを取り付け、当該斜面の土塊が移動した時に前記変位センサが検知した信号に基づいて危険度信号を発信する危険度信号発信手段を設け、この危険度信号発信部の発信情報を受信する危険度信号受信手段を設ける。
(もっと読む)
1 - 20 / 182
[ Back to top ]