
Fターム[2F069AA51]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 形状パラメーター (256)
Fターム[2F069AA51]の下位に属するFターム
Fターム[2F069AA51]に分類される特許
1 - 20 / 37
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 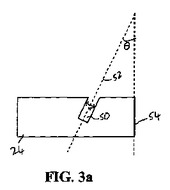 (もっと読む)
(もっと読む)
センサホルダ及びセンサ支持装置
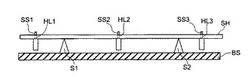
【課題】棒状のセンサホルダに取り付けた3つのセンサにおける鉛直方向の位置ズレを抑制する。
【解決手段】予め決められた孔HL1〜HL3にセンサSS1〜SS3を固定して検出軸方向を鉛直方向に向けた時の、センサホルダSHのたわみ量は、2点支持の梁の集中質量と分布質量を考慮して計算できるので、3つのセンサSS1〜SS3の固定位置の重力によるたわみが等しくなる位置が定まるため、孔HL1〜HL3にセンサSS1〜SS3を配置するのみで、センサSS1〜SS3の鉛直方向のズレがゼロとなる。これにより精度の良い測定が可能となる。
(もっと読む)
測定装置及び測定方法

【課題】被測定物を精度良く測定が可能であるとともに、安価な測定装置を提供する。
【解決手段】長尺な被測定物Aの形状を測定する測定装置であって、ベース1と、前記ベース1の一方側に設けたビーム支持部2と、前記ビーム支持部2の上部にピン軸4によって一方側の両側部を支持し、他端側を傾動及び倒立可能に設けたビーム5と、前記ビーム5の一方端に設けられ、前記被測定物Aの一端を支持及び回転可能する支持部6と、前記ビーム5の他方端に移動可能に設けられ、被測定物の他端をクランプ及び回転可能するクランプ部7と、前記ベース1と前記ビーム5との間に設けたビーム傾動及び倒立用のアクチュエータ8と、前記被測定物Aに対向するように、前記ビーム上に移動可能に設けた寸法測定部10とを備える。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、非接触式距離計を金属帯の長手方向に走査させる距離計走査手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
校正用円環状部品、軸部品、軸受及びこれらの製造方法
【課題】測定機の測定速度を自由に設定でき、この測定機の暗振動も考慮した校正を行える校正用円環状部品を、低コストで得られる構造及びその製造方法を実現する。
【解決手段】円環状素材14に、所定の数の凸部12、12を有するスプライン軸11を圧入する事により、この円環状素材14の外周面にこれら各凸部12、12に対応する数の凹凸を形成する。そして、この外周面に研磨加工を施す事により、これら各凹凸を除去してこの外周面をほぼ円筒面とする。その後、上記円環状素材14をこのスプライン軸11から抜き取る事により、測定面である外周面に、所定の大きさの振幅を有し、上記各凹凸に対応する数の凹凸を、互いに滑らかに連続した状態で形成して、上記校正用円環状部品を得る。これにより、上記課題を解決する。
(もっと読む)
形状パラメータ決定方法、形状パラメータ決定装置、及びコンピュータプログラム
【課題】 3次元形状の計測データに対応する理論形状を記述するパラメータを高速に且つ安定して決定することができるようにする。
【解決手段】 パラメータα(k)、β(k)を既知量として、形状計測データPiから中心軸101までの距離の誤差の2乗和S(x0(k+1),y0(k+1),α(k),β(k))を最小とするパラメータx0(k+1)、y0(k+1)を決定し、決定したパラメータx0(k+1)、y0(k+1)を既知量として、形状計測データPiから中心軸101までの距離の誤差の2乗和S(x0(k+1),y0(k+1),α(k+1),β(k+1))を最小とするパラメータα(k+1)、β(k+1)を決定する。
(もっと読む)
測定部支持機構およびそれを備えた薄板の表面形状測定装置
【課題】 組立て誤差、作動誤差の影響を最小限とする測定部の支持機構およびそれを備えた薄板の表面形状測定装置を提供することを課題とする。
【解決手段】 基台110の両端に立設された垂直移動手段310に対して、水平移動手段320との連結支持として、片側を固定支持し、他方側を水平移動手段320の長手方向あるいは、長手方向と長手方向と直角方向とにフリーとした支持としたことで、離れて平行に立設する垂直移動手段310に組立て上の誤差があっても、その影響を受けずに水平移動手段320を作動させることができ、組立て上の誤差等が測定結果に悪影響を与えることを抑制できる。
(もっと読む)
プレス熱板精度の検査方法
【課題】
実際の成形に即した条件で分析することができる熱板精度の検査方法を提供する。
【解決手段】加熱加圧後に識別可能な格子状マーキング1及び円形マーキング2を表面に形成したプリプレグを、プレス熱板間に置き、加熱加圧して、加熱加圧後に格子状マーキング1及び円形マーキング2の変化を調べ、熱板の平行度を確認する。
(もっと読む)
駆動装置
【課題】 検出器の移動に際しても、検出器の姿勢変化を極力抑え、高精度な測定を保証できる駆動装置を提供する。
【解決手段】 フレーム21に設けられるとともに、外側に粗さ検出器の移動方向と平行に設けられた断面コ字状のガイドレール22と、ガイドレール22に沿って摺動可能に設けられかつ検出器5を保持した断面矩形枠状のスライダ24と、このスライダ24をガイドレールに付勢する付勢手段31と、スライダ24をガイドレール22に沿って移動させる駆動手段41とを備える。駆動手段は、モータ42と、このモータにより駆動されるボールねじ軸47と、このボールねじ軸に螺合されスライダに連結されたナット部材48とを備える。ボールねじ軸47は、スライダ24の摺動面(スライダ24の4つの内面)の略中心近傍に配置されている。
(もっと読む)
スロットロッドのスロット形状検出方法
【課題】 SZonSZスロットの反転角度および捻回ピッチを測定することができるスロットロッドのスロット形状検出方法を得る。
【解決手段】 連続する短周期SZ撚りの反転角度の平均を算出して短周期SZ撚りの反転角度を検出する。また、短周期SZ撚りの最大反転角度と最小反転角度を検出し、前記最大反転角度から前記最小反転角度を差し引き、さらに前記短周期SZ撚りの平均反転角度を差し引くことで、長周期SZ撚りの反転角度を検出する。
(もっと読む)
形状特性取得方法、プログラム及び記録媒体
【課題】半導体ウェハの外周部の形状特性を正確に取得することができる形状特性取得方法及びプログラムを提供すること。
【解決手段】半導体ウェハの表裏面の径方向に沿った形状データを取得し、この形状データから半導体ウェハの厚みの中点を算出し、前記中点から2次の近似曲線である基準曲線を算出する。そして、前記半導体ウェハの表面及び裏面の形状データから、前記基準曲線の成分を除去したプロファイルを求め、さらに、半導体ウェハの外周部を除く前記プロファイルの所定の区間を1次関数でフィッティングした後、このフィッティングしたプロファイルから、前記1次関数の成分を差し引く。これにより、前記所定の区間が略変位のない基準線27を有するプロファイル28を得ることができる。そして、この基準線27に対する半導体ウェハの外周部の所定位置におけるずれ量T1,T2を求める
(もっと読む)
ロッドの反り検査方法
【課題】
断面円形のロッド(棒状線材)を、その反り(曲がり)の大小に関して選別する簡便な方法を提供する。
【解決手段】
転がし台上の一面に二つの棒状ストッパーを所定距離離して平行に対向配置し、被検査物ロッドを一方の棒状ストッパーに当接させて転がし台に載置し、回転転落させて他方の棒状ストッパーに到達静止させ、被検査物ロッドの載置位置と静止位置のロッド軸方向のずれ量または静止位置における被検査物ロッドと他方の棒状ストッパーからのずれ量から、被検査物のロッドの反りについての良不良を判別する。
(もっと読む)
機上形状測定方法
【課題】 原器を被測定物の形状の種類分用意することなく、また、形状が異なる度に補正のための測定を行うことなく、衝となる測定機と機上形状測定機の機差を補償する。
【解決手段】 任意の設計式にて面形状を定義できる被測定物である被測定原器17を、衝となる外部形状測定機12にて測定して形状を明らかにする工程と、超精密加工用旋盤1に設置された形状測定機3にて被測定原器17を測定して形状を明らかにする工程と、外部形状測定機12により明らかにされた形状と形状測定機3により明らかにされた形状との誤差を求める工程と、誤差に基づいて加工機上に設置された形状測定機3の測定結果に補正を与える工程とを行う。
(もっと読む)
三次元測定方法及び装置
【課題】 測定装置自体が変形することで測定値に変動が生じてしまう場合でも、変動量を補正可能な高精度の三次元測定方法及び装置を提供する。
【解決手段】 測定中における測定機構のドリフトに起因する測定データにおけるX軸、Y軸、及びZ軸の各方向における変動量を求めることから、長時間の測定を必要とする形状測定において、温度等の環境に起因するドリフトを除去し、高精度の測定を行うことが可能となり、測定環境や装置に費用をかけ、温度変動を小さくにする必要がなくなる。
(もっと読む)
タイヤ接地形状測定方法及び装置
【課題】常に精度良くタイヤの接地面形状を測定することが可能なタイヤ接地形状測定方法及び装置を提供する。
【解決手段】裏面31側から孔33を介して路面体3の表面29に接地するタイヤ1までの距離を距離センサー5により測定し、距離センサー5で検出した距離信号の値が所定の閾値の範囲aとなる場合、タイヤ1が路面体3に接地した接地面1Eのデータであると判定し、その接地面1Eであると判定したデータ群からタイヤ1の接地面形状を求める。
(もっと読む)
ベルト表面の変形検査装置
【課題】ベルト表面の変形を効率的にかつ精度良く検査する。
【解決手段】光学式の変位測定器16が、プーリ12,14に巻き掛けられたベルト10の表面の変位を測定する。変位測定器16で測定された測定データは、ベルト10の表面の変形量を算出する変形算出部24に入力される。変形検出装置20の記憶部22には、プーリが回転した場合におけるプーリ表面の位置変位情報が予め記憶されている。測定データが入力されると、変形算出部24は、記憶部22からプーリ表面の位置変位情報を読み出し、これらの測定データとプーリ表面の位置変位情報とからベルト10の表面の変形量を算出する。
(もっと読む)
被計測物装着具及びこれを用いた歯科用補綴物の三次元形状データの作製方法
【課題】 軸心がZ軸を成す回転テーブルと載置台が固定されたXYテーブルと一つのレーザセンサで計測する計測部とを備えた三次元計測装置により断面形状が回転体以外の形状を成す凸状及び/又は凹状の係合部を有する係合部位が顎骨側に突設した歯科用補綴物の係合部位以外の部分の三次元形状データを作製する際に用いる被計測物装着具とこれを用いたデータ作製方法を提供する。
【解決手段】 被計測物装着具2を、円柱状部2aの下面に載置部2bと、円柱状部2aの側面と上面との境界部に傾斜部2cと、円柱状部2aの上面にその上面に装着部2eを有する柱状部2dとで構成し、この被計測物装着具2の装着部2eに歯科用補綴物の模型3を係合し載置台1bに載置した後に、レーザセンサで受光量が急激に低下する箇所を特定して傾斜部2cの下端を検出することにより模型3の係合部位3aの上端を算出し、模型3の係合部位3a以外の三次元座標を作製する。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
表面情報計測装置及び表面情報計測方法
【課題】 XY方向へのクロストークを極力なくしてZ方向への直進性を向上し、高精度に試料の形状情報や物理情報を計測すること。
【解決手段】 探針2aを有するプローブ2と、該プローブ2を固定すると共に電圧を印加されたときに試料表面Bに垂直なZ方向に伸縮するZアクチュエータ4と、該Zアクチュエータ4に電圧を印加する印加手段5と、該印加手段5の作動を制御する制御手段とを備え、Zアクチュエータ4が、Z方向に伸縮自在な圧電体20と、圧電体20の内周面又は外周面に少なくとも周方向に3つ以上に分割された状態でそれぞれ電気的に独立して設けられ、接触する領域の範囲で圧電体20に電圧を印加して伸縮させる複数の分割電極22とを有し、制御手段が、分割電極22にそれぞれ接触する圧電体20の各接触領域の伸縮量がそれぞれ同一となるように、予め決められた電圧印加量の比率で電圧を印加するよう印加手段5を制御する表面情報計測装置1を提供する。
(もっと読む)
平行出し装置および平行出し方法
【課題】被測定物の測定面と測定機の測定方向との平行出しを、効率よく行うことのできる平行出し装置、および、平行出し方法を提供すること。
【解決手段】被測定物に並列した移動案内体と、移動案内体に沿って移動するスライダとを備える。スライダの移動位置におけるスライダ移動位置、および、測定物の測定面位置を、スライダに備えられた光電式リニアスケール5、および、センサ6によって検出し、これらを基に、CPU71は、スライダの移動方向を基準とする測定面の傾き直線を演算し、傾き直線から揺動支点の調整基準値を設定し、調整基準値をメモリ72に記憶させ、記憶させた調整基準値、および、センサ6によって検出される測定面位置の差を調整量として算出する。調整量はモニタ8に表示され、作業者は、表示された調整量に従って移動案内体の姿勢を調整する。
(もっと読む)
1 - 20 / 37
[ Back to top ]