
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
1 - 20 / 166
位置計測装置及び位置計測システム
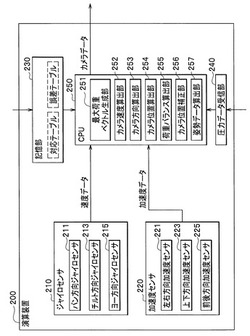
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
印刷装置、その制御方法およびプログラム

【課題】ロール紙のカール量を簡単な方法で測定することにより適正なカールの補正を行うことを目的とする。
【解決手段】ロール紙10が収納されたカートリッジ110と、前記カートリッジ110内のロール紙10の先端を検知する検知手段と、前記ロール紙10を回転させて、前記ロール紙10を搬送するための駆動手段と、前記検知手段により前記ロール紙10の先端を検知した後に、前記駆動手段により前記ロール紙10を回転させることにより、前記検知手段により再び前記ロール紙10の先端を検知し、前記ロール紙10の先端を検知してから、再び前記ロール紙10の先端を検知するまでの前記ロール紙10の搬送量に応じて、前記ロール紙10のカール量を判定するカール判定手段と、を有する。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
寸法測定端末
【課題】画面サイズを上回る大きさの被測定物の寸法を高精度で測定する用途に好適な携帯端末、寸法測定システム、寸法測定方法、及び寸法測定プログラムを提供する。
【解決手段】携帯端末1は、姿勢センサ13と、記憶部15と、処理部14と、表示部11とを具備する。姿勢センサ13は、携帯端末1の姿勢情報を検出する。記憶部15は、基準寸法を保持する。処理部14は、姿勢情報及び基準寸法に基づいて被測定物の寸法を計算する。表示部11は、寸法を表示画面に表示する。
(もっと読む)
複数の設備の相対位置を監視するデバイス
【課題】共通基準システム(4)上に振動隔離機構(2、3、5)を介して搭載され、該共通基準システムに対して変動する位置をとる、リソグラフィ・デバイス(1)及びワークステーション・デバイス(6)を含む装置において、両デバイス間の相対位置の変動を監視して該装置が誤動作しないように調整する。
【解決手段】前記共通基準システムに対する前記リソグラフィ・デバイス及び前記ワークステーション・デバイスの個々の位置を測定する手段と、測定された両デバイスの個々の位置から算出される両デバイス間の相対位置(d、7b)が所定の公差範囲内(7a−7c)にあるかどうかを評価する手段を含む装置。
(もっと読む)
情報処理装置および情報処理プログラム
【課題】異常データの影響を低減して、測定領域全体の形状データを高精度に得ることができる情報処理装置を提供する。
【解決手段】本発明の情報処理装置は、形状測定装置により所定領域単位でワークの形状を測定して得られた複数の形状データを取得するデータ取得部と、ワークと形状測定装置との位置姿勢関係を示す位置姿勢情報を取得する情報取得部と、位置姿勢情報に基づいて、各形状データの座標系を共通の座標系に変換する変換部と、共通の座標系における一の形状データの座標を補正して当該形状データが示す領域に隣接する領域の形状データにつなぎ合わせるステッチング処理を行うための補正量を、一の形状データが示す領域と隣接する領域との間で重複する領域の形状データを用いて算出する補正量算出部と、補正量または補正量による補正後の形状データに基づいて、ステッチング処理の信頼度を算出する信頼度算出部と、を有する。
(もっと読む)
計測装置、及び計測方法
【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
センサベースのオリエンテーションシステム
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
形状評価方法、形状評価装置、プログラム及び記録媒体
【課題】輪帯面と壁面とが交互に連続して形成された被測定面であっても、フィッティング精度を向上させることを目的とする。
【解決手段】複数の点データを列毎にグループ化して複数の点列データを生成する(S102)。点列データ毎に走査軌跡面関数をそれぞれ求める(S103)。複数の点データの中から各輪帯面のデータと見做せる点データを各輪帯面に対応して抽出し、得られた抽出データ毎に、その抽出データを関数近似して輪帯面を示す輪帯面関数をそれぞれ求める(S104)。設計データに基づいて壁面関数をそれぞれ求める(S105)。各面関数が交差する各々の交点データを求める(S106)。参照データと交点データとをフィッティングさせる座標変換パラメータを求める(S107)。座標変換パラメータで各点データを座標変換する(S108)。座標変換した点データと被測定面の設計データとの差分を求める(S110)。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
形状測定方法、これを用いた加工方法、および形状測定装置
【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する関節式アームを提供する。
【解決手段】関節式アームCMM10は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
計測点からの円筒情報の抽出方法
【課題】
本発明の課題は、円筒表面の計測点から円筒データを確実に作成できると共に、高精度な近似が可能な計測点からの円筒情報の抽出方法を提供することにある。
【解決手段】
上記課題を解決するために、本発明では、最初に計測点から球の中心を定め、次に、球の中心を円筒の仮中心点とし2つの角度を変化させて投影方向を定めて計測点を投影し、円周と投影した計測点の距離の二乗の総和が最小になる角度を選択し、次に、当該角度を収束計算で精度向上させ、最後に、精度向上させた角度、仮中心点を当該角度で投影した値を円筒中心の初期値とし、円周と投影した距離の二乗の総和が最小になる角度および円の中心点を定めることによって、短時間で精度の良い円筒の半径、中心、中心軸を得ることを特徴とする。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
1 - 20 / 166
[ Back to top ]