
Fターム[2F069AA77]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430) | 面の角度 (48)
Fターム[2F069AA77]の下位に属するFターム
Fターム[2F069AA77]に分類される特許
1 - 20 / 38
表面形状の特徴形状抽出演算方法、及び表面形状補正演算方法

【課題】 様々な表面形状に対して比較的に容易に適用可能な特徴形状抽出演算方法及び表面形状補正演算方法を提供することを目的とする。
【解決手段】 この方法は、表面形状測定装置によって測定された被測定物の表面形状を表わす表面形状測定データ点群から、該被測定物の表面形状の所要の特徴形状を表わす特徴形状データ点群を抽出する特徴形状抽出演算方法であって、前記表面形状測定データ点群によって構成される仮想表面に接触可能な二次元もしくは三次元の形状を有する仮想接触子を想定し、前記仮想表面における複数の異なる位置において該仮想接触子を該仮想表面に接触させたことを仮想したときに、各位置において該仮想接触子が接触する前記仮想表面上の1以上の接触点における前記表面形状測定データ点群の中のデータ点を抽出して前記特徴形状データ点群とする特徴形状抽出演算方法である。
(もっと読む)
機械角度測定装置

【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
車両の路面傾斜角算出装置
【課題】本発明は、バラツキを抑え、精度良く路面の傾斜角を算出することのできる車両の路面傾斜角算出装置を提供することにある。
【解決手段】車速センサで検出される現在の車速Vが所定車速V0以下であれば(S14)、車速V、ブレーキ圧センサで検出されるブレーキ油圧P、走行負荷トルク検出部で検出される走行負荷トルクT及びタイマで計測される時間Sを積算し、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalを算出し(S16)、車速センサで検出される現在の車速Vが0km/hで車両が停止したところで(S18)、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalより坂路傾斜角θを算出する(S20-S32)。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 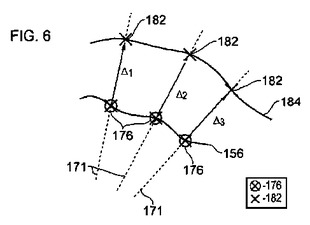 (もっと読む)
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
レール車両の、少なくとも一つの輪軸を有している台車の状態を監視するための方法
本発明は、レール車両の、少なくとも一つの輪軸(4)を有している台車(3)の状態を監視するための方法に関する。本方法では、輪軸(4)の車輪(8)は軸(6)によって固く結合されており、且つ、ほぼ円錐形の車輪輪郭を有しており、台車に配置されているセンサ手段(10)から供給される信号から、車輪(8)の円錐形の車輪輪郭を基礎としている、台車(3)の輪軸(4)の蛇行動に対応する信号がフィルタリングされて取り出され、蛇行動の周波数(f)が、その都度存在している車両速度(v)のような周囲条件を基準にして求められ、蛇行動の周波数(f)に関して記憶されている、存在している周囲条件に対して典型的な値又は値領域と比較され、測定された前記周波数(f)の、該周波数(f)に関して記憶されている値又は値領域からの偏差が監視される。 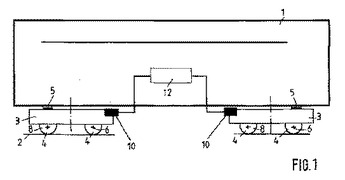 (もっと読む)
(もっと読む)
光学素子設計製造支援システム
【課題】 光学素子製造において、光学素子製品の低コスト、短納期を実現可能とする光学素子設計製造支援システム、および光学素子計測システムを提供する。
【解決手段】 光学有効面設計形状を定義する数式情報を記録したデータと、光学素子全体形状を記録した3DCADデータと、光学素子形状計測に用いる測定治具、雇設計形状を記録した3DCADデータを関連付けて一元管理する。本発明による光学素子設計製造支援システムは、これら設計情報のデータ管理システムと、光学素子や測定治具、雇設計時に実施する設計制約条件自動判定演算手段と、判定結果に基づいた設計製造ワークフロー制御機能を備える。これより、人手が介在することによるデータ処理ミス、および設計制約条件に起因した再設計や再測定といった製造工程の戻りが解消可能となる。
(もっと読む)
プログラム、情報記憶媒体及びフランジ角度推定装置
【課題】鉄道用車輪の摩耗によるフランジ角度の変化を、走行距離との関係で定量的に推定可能とすること。
【解決手段】鉄道用車輪の設計時のフランジ角度を設定し、(1)設定されたフランジ角度をDとし、走行距離をX、フランジ角度をYとした場合の式「Y=A×tanh(B×X)+C×X+D」から求まるXとYとの関係、(2)推定対象としている鉄道用車輪の計測履歴データにおけるフランジ角度の計測値と当該計測時の走行距離との関係、が所定の近似条件を満たす場合の定数A,B,Cを算出する。
(もっと読む)
車輪模擬装置
【課題】車輪が未装着の車輪取付部に取り付けるだけで車輪のアライメントを精度よく測定することができ、自動車車体を組み立てる組立ラインにて車輪アライメントを測定する際に好適に用いることができる車輪模擬装置を提供する。
【解決手段】自動車の車輪アライメントを測定する際に用いられ、車輪が未装着の車輪取付部3に取り付けて、車輪取付部3に車輪が取り付けられた状態を模擬的に形成する車輪模擬装置1であって、車輪取付部3に連結する連結部10と、車輪取付部3の測定箇所を露出させる開放部11と、車輪取付部3の下方に所定距離を存して設けられた接地部12とを備える。連結部10に、車輪取付部3の軸端に取り付ける取付部材13と、取付部材13に着脱自在に連結する連結手段14とを設ける。
(もっと読む)
ハブの姿勢検出方法及びその装置
【課題】車両のハブに車輪を取付ける際のハブの傾き、中心及びハブボルトの方位の検出工数を低減できる技術を提供することを課題とする。
【解決手段】距離計測部16をハブ26に臨ませる。距離計測部16を、矢印(3)のように、100mm/sの速度で移動させる。このとき、第1距離計31は破線で示すエリアPまでの距離を計測し、第2距離計32は破線で示すエリアQまでの距離を計測する。
【効果】基準位置からエリアP、Qまでの距離を計測する。ハブ面の全部ではなく、2つのエリアのみ距離計測するので、計測工数及び演算工数が低減できる。加えて、非接触のまま1回の走査で距離計測が完了するので、計測工数を低減できる。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】傾斜計間の梁状構造の被支持体の長さ方向に対する被支持体の傾斜角を推定することができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ(支持体)5に支持され、1本からなる、又は接合されて1本となる梁状構造のレール(被支持体)3の長さ方向に間隔を空けてレール3に沿って設置されている、レール3の長さ方向に対する傾斜角を測定する複数個の傾斜計6と、この傾斜計6から得られる傾斜角から、傾斜計6,6間毎にレール3の長さ方向に沿った位置に対するレール3の傾斜角を推定する関数を与える演算装置7Bとを有することを特徴とする。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
相対高さ検出装置
【課題】突出した2点あるいは3点間の相対高さを、簡単な構成により、高い精度で検出可能な相対高さ検出装置を提案すること。
【解決手段】相対高さ検出装置1は傾斜表示板2を備えており、基準面5aに載せた測定対象の球体a、bの上に点接触状態で傾斜表示板2を載せる。傾斜表示板2には角度センサ3が組み込まれており、球体a、bの高低差に対応した傾斜姿勢となっている傾斜表示板2の傾斜角度が角度センサ3によって測定される。演算装置4では、傾斜角度θxと、球体a、b間の既知の距離L1に基づき、球体a、bの高さの違いを検出する。球体a、bの微小な高低差が傾斜表示板2の比較的大きな傾斜角度として現れるので、この傾斜角度に基づき、球体a、b間の高低差を高い分解能で検出できる。
(もっと読む)
幾何学量計測方法及び幾何学量計測装置
【課題】センサヘッドにおけるセンサの設置ずれ量及びセンサヘッドと計測対象との間の相対傾斜に起因する誤差を無くすことのできる幾何学量計測方法を提供する。
【解決手段】少なくとも3個のセンサを配置したセンサヘッドを計測対象に沿って相対移動させ、各センサから得られる検出信号を用いて計測対象表面の幾何学量を計測する。予め、基準平面30に対して真直度の計測を行い、両側のセンサの基準点を結ぶ線分からの中央のセンサの基準点の計測方向に関するずれ量を算出すると共に、基準平面とセンサヘッドとの間の相対傾斜とずれ量との間の関係を対のデータとして補正テーブルを作成する。幾何学量の計測に際しては、計測対象とセンサヘッドとの間の相対傾斜を算出し、かつ前記補正テーブルを参照して前記算出されたずれ量を取り出し、該取り出したずれ量と3個のセンサから得られた検出信号を用いて計測対象表面の幾何学量を演算する。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
パターン生成装置及び表面の物理特性を測定するための装置
【課題】パターンを書き込む際に生じるあらゆる物理的変形に無関係に、オブジェクトの表面にパターンを書き込むための方法及びパターン生成装置を提供すること。
【解決手段】本発明は、露光装置での使用を対象とするオブジェクトの表面にパターンを書き込むための方法であって、表面を備えた厚さTのオブジェクトをパターン生成装置のステージの上に配置するステップと、表面を多数の測定ポイントに分割するステップであって、隣接する2つの測定ポイントが所定の最大距離を越えない距離Pで間を隔てられているステップと、各測定ポイントにおける表面の勾配を決定するステップと、各測定ポイントのx−y平面における二次元局部オフセットdを勾配及びオブジェクトの厚さTの関数として計算するステップと、前記表面に書き込むパターンを、二次元局部オフセットdを使用して修正するステップとを含む方法を提供する。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
切削工具のパラメータを抽出するためのシステム及び方法
【課題】切削工具のパラメータを抽出するための方法を提供する。
【解決手段】本方法は、切削工具の表面に対応する点集団を有する測定データセットを取得する段階と、所定のセクションにおいて点集団を仮想的にスライスして該所定のセクション上の点セットを取得する段階とを含む。本方法はまた、点セットを通る複数の曲線を生成しかつ複数の曲線を最適化して最適化適合曲線を生成する段階と、最適化適合曲線から切削工具のパラメータを抽出する段階とを含む。さらに、提示した回転角投影法に基づいて、切削工具について複数のパラメータを抽出することができる。
(もっと読む)
1 - 20 / 38
[ Back to top ]