
Fターム[2F069BB04]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | ロボット;マニピュレータ (25)
Fターム[2F069BB04]に分類される特許
1 - 20 / 25
位置計測装置及び位置計測システム
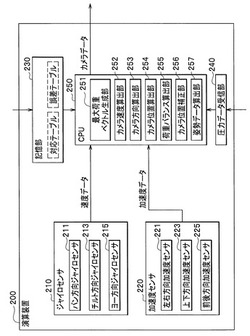
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法

【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
機械角度測定装置
【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
関節チェーンの運動を表わす情報決定のための自律的システム及び方法
本発明は、少なくとも2つの固体要素(ES1_1、ES2_1、ES1_2、ES2_2、ES3_2、ES1_3、ES2_3、ES3_3、ES4_3)、及び前記2つの要素をつないでいる少なくとも1つの関節(ART1_1、ART1_2、ART2_2、ART1_3、ART2_3、ART3_3)を備える、関節チェーン(CA_1、CA_2、CA_3)の運動を表わす情報を決定するための自律システムに関する。本システムは、前記関節チェーンの2つの異なる要素上に固定して取り付けられ、行われた測定を伝送するために適する、装置間距離を測定するための、少なくとも2つの装置(DISP1_1、DISP2_1、DISP1_2、DISP2_2、DISP3_2、DISP1_3、DISP2_3、DISP3_3、DISP4_3)を備える。さらに、本システムは、測定装置により供給された少なくとも1つの測定値に基づき、2つの測定器を隔てる少なくとも1つの距離を決定する手段と、装置間距離を測定するための前記装置により伝送された測定値に基づき、前記関節チェーンの運動を表わす情報を計算するのに適する、前記関節チェーンに取り付けられた計算手段(CALC)とを備える。 (もっと読む)
センサユニット
【課題】姿勢等の高精度のセンシングが可能なセンサユニットを提供する。
【解決手段】姿勢及び動きを検出するジャイロユニット6、視野内の物体の相対姿勢及びその動きを検出する人工網膜IC7、周辺に存する音源の存在を検出する音響センサ8、D−GPS9、及びこれらのセンサの動作を制御するコントローラ5を可搬性の筐体に収容してセンサユニットを構成する。コントローラ5は、各センサ3〜9による検出結果を実時間で受け入れ、これらの検出結果を所定のメモリ領域上に形成された情報空間内に更新自在に記録し、記録された検出結果をもとに、情報空間内において自己に対する上記物体の位置、方向及び動き、つまり筐体と物体のどちらが動いたを特定するようにした。
(もっと読む)
原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボット
【課題】関節部を介して回動自在に支持されたリンクの原点位置を設定するのに好適な原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、回転関節14の回転軸周りに脚部12と共に回動する第1ドグ200及び第2ドグ202と、脚部12の基準回転角度位置へと回動した第1ドグ200を検出する基準位置検出センサ210と、脚部12の一方の回動方向の限界回転角度位置へと回動した第2ドグ202を検出する限界位置検出センサとを備え、回転関節14を回転して脚部12をその初期位置から最初に限界位置検出センサの配設位置方向に回動させると共に、仮の原点位置を検出する際の第1ドグ200の基準位置検出センサ210の検出位置への進入方向を揃え、更に、仮の原点位置と、その検出範囲と、エンコーダの発生するパルス信号とに基づき原点位置を設定する構成とした。
(もっと読む)
可動情報を伝送するための位置測定装置及び方法
【課題】数値制御機械等において、制御部へ正確なデータを伝送する位置測定装置を提供する。
【解決手段】位置測定装置は、位置測定ユニット10、速度測定ユニット20、算術ユニット30、及びインターフェースユニット40を持つ。位置測定ユニット10で2つの測定値(P;Pn;Pn−1)が測定され、速度測定ユニット20で物体の移動値vが算出される。算術ユニット30は測定値(P;Pn;Pn−1)及び移動値vが供給されて、シーケンス電子部100における実際の測定値(P;Pn;Pn−1)の測定間の時間間隔を特定し、移動値vの訂正値Kを算出する。そのために、訂正値Kのデータワード幅が、移動値vのデータワード幅より実質的に小さい。
(もっと読む)
切断機用自在軸受装置の位置調整用装置および方法
本発明は、とりわけ切断機における自在軸受装置(21)の位置調整を行う装置と方法に関する。前記切断機、ポータルロボット等における工具のいわゆるTool Center Point(TCP)と呼ばれる、工具中心点として表されるものに関しての位置調整またはキャリブレーションが、調整装置の単一の可動な測定先端で行われ、この調整装置は工具と直接的に作用結合し、ソフトウェア制御による測定方法によって、工具の最適に調整されるべき開始位置の記録を行い、この開始位置の再現性を保つことを可能とする。TCPの決定はメンテナンスおよび調整作業の後か、または工具および切断機の衝突の後で必要となる可能性がある。本発明は装置技術としては、自在軸受装置(21)の位置調整のための調整装置であり、とりわけ切断機におけるものであり、この調整装置はフレーム(1)から見て3つのリンク部材、第1のリンク部材(3)、第2のリンク部材(4)および第3のリンク部材(5)を連結したものを備え、これらのリンク部材は互いに重なって、直動関節(12、13、14)を介して前記フレーム(1)に、直交座標系の3つの全ての軸において、互いに遊び無しに、軽く(kraftfrei)動くように結合されており、ここでどの軸にも基準位置は存在せず、そして第3のリンク部材(5)は直動関節(14)を介してフレーム(1)に結合し、第2のリンク部材(4)は直動関節(13)を介して第3のリンク部材(5)に結合し、そして第1のリンク部材(3)は直動関節(12)を介して第2のリンク部材(4)に結合し、これらのリンク部材(3、4、5)は一体型で形成されており、それぞれのリンク部材は個々に生成された部品から構成されるのでなく、1個の単一の部品であり、同様にフレームから最も離れた第1のリンク部材(3)には、重力方向に反対に物理力接続(kraftschlussig)によって、その直交する面に形状接続(formschlussig)によって測定アダプタ(16)に接続された装着部(3b)を備え、ここで第1、第2および第3のリンク部材(3、4、5)には回転型の測定センサ(6、7、8)が配置されており、これらはこれらの測定センサは測定ピニオン(9、10、11)および各々のリンク部材(3、4、5)に設けられた測定ラック(3c、4a、5a)を用いて、これらの隣接するリンク部材(4、5)および前記フレーム(1)に対する相対的運動を検出し、これらの測定値は変換装置(2)で処理され、データライン(23)による変換装置(2)とコンピュータ(24)とのオンライン接続を備える。 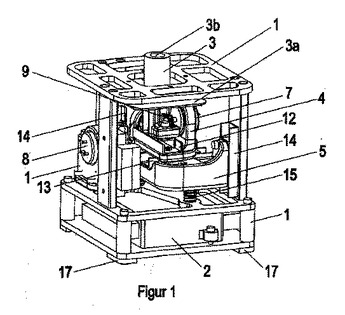 (もっと読む)
(もっと読む)
基板取り扱いロボットの改善した校正方法
加工システムにおけるロボットを校正する方法(500)が提供される。方法は、距離センサ(214)をロボットのエンドエフェクタ(102)に脱着自在に結合すること(502)、及び距離センサをしてセンサ(214)から基板支持体(108)までの距離を計測させること(506)を含む。そして、その距離が選択されたしきい値を満たす又はその範囲内であるかどうかを判定する。距離が選択されたしきい値を満たす又はその範囲内であるときのロボットジョイント位置を記録する。 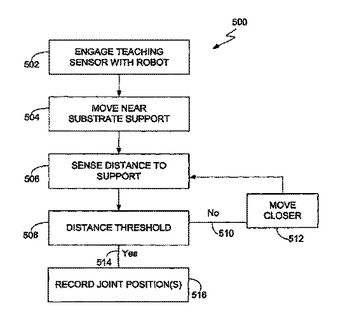 (もっと読む)
(もっと読む)
姿勢角決定装置およびその決定方法
【課題】複雑な関係にある座標系間であってもその姿勢関係を容易に,精度良く求めることのできる姿勢角決定装置およびその決定方法を提供すること。
【解決手段】本発明の姿勢角決定装置は,各リンクに設定された3軸直交座標系の各軸について,軸方向と重力ベクトルの方向との間の角度である傾斜角を取得する傾斜角取得部と,第1リンクと第2リンクとの姿勢関係を固定したまま最大3通りの全体姿勢を取らせる姿勢変化指示部と,各全体姿勢における各リンクについて各軸方向の傾斜角から傾斜ベクトルを求める傾斜ベクトル算出部と,各リンクについて全体姿勢ごとに求められた傾斜ベクトルにより傾斜行列を求める傾斜行列算出部と,傾斜行列算出部により求められた各リンクの傾斜行列に基づいて,一方と他方の逆行列との積を求めることにより,姿勢角を表すリンク行列を算出するリンク行列算出部とを有する。
(もっと読む)
モーションキャプチャー装置およびそれに係る方法
本発明はN個の関節化されたセグメントで構成されるある構造体の運動を捕捉するための装置に関し、以下の特徴的構成を有する。
− 連続的に時間tkにおいて、基準を形成するある基準座標系におけるランク
少なくとも出力する第一の手段(ML)、ここで、kは1か、または1より大きい整数である、そして、
− 様々なセグメントにわたって分布し、ランク1からランクnの各セグメン
本発明は生体力学の解析、遠隔操作、ある人物のアニメーション等に応用される。
(もっと読む)
多関節型座標測定装置
【課題】 多関節型測定アームに測定誤差要因となるストレスがかからない測
定姿勢を維持させる。
【解決手段】 測定アームの各関節の角度に基づき、1)測定アームの第1リ
ンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関
節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより
発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、
のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサか
らの空間座標値の出力を中止する。
(もっと読む)
移動体の高精度姿勢検出装置
【課題】 移動体に搭載した慣性センサ出力の中から移動体の姿勢演算に不要な慣性成分を除去して、移動体の姿勢検出を精度良く検出することのできる移動体の高精度姿勢検出装置を提供する。
【解決手段】 移動体の高精度姿勢検出装置は、移動体に、当該移動体の慣性を検出する慣性検出手段と、当該移動体の動作を生成する動作生成手段と、姿勢演算を行う演算処理手段を備え、演算処理手段により慣性検出手段の出力と動作生成手段の出力に基づき移動体の姿勢を高精度に検出する。
(もっと読む)
スポット溶接ロボットの電極チップ整形監視方法及び同監視装置
【課題】 電極チップ整形監視装置を簡素化でき、ロボットのティーチングが不要で、且つサイクルタイムに影響を与えないようにする。
【解決手段】 スポット溶接ロボットに設けた各軸回りに電極チップを回動させるためのサーボモータ24における回転軸の回転位置、回転軸の回転速度及びモータ電流をそれぞれフィードバック制御するサーボモータ制御部70Aのフィードバック量(即ち、検出電流If、位置情報Pf、速度情報Vfのうちの少なくとも一つ)と、このフィードバック量に対応させて予め設定した設定値幅とを比較することにより、電極チップの整形状態及びチップドレッサの作動状態を監視する。
(もっと読む)
製品搬送台車、ロボット位置計測システム及びその計測方法
【課題】 製造ラインにおけるロボットの作業点を高精度で計測するとともに、作業性及び安全性の向上を図る。
【解決手段】 作業対象製品を載置して搬送レール上を搬送する製品搬送手段10を所定位置に停止させる。作業対象製品の設計指定位置9を目標に製品製造用ロボット12の作業部15を移動させ、製品搬送手段10に固定設置された計測手段11により上記ロボット12の作業部15の位置を計測する。そして、ロボット12の作業部15の位置と設計指定位置(指定点9)との誤差を計算し、その誤差に基づいて、ロボット12の作業部15の位置が設計指定位置に一致するようロボット12に対し補正指示を出す。
(もっと読む)
三次元ワーク測定方法
【課題】 厳格な位置決めを必要とせず、ワークを測定できる三次元ワーク測定方法を提供する
【解決手段】 測定対象であるワーク40を、測定用ロボット20により三次元測定するための三次元ワーク測定方法であって、ワーク40上に設定された基準点のうち一点を位置決めピン12aに位置合わせして、基準点を測定する第1測定工程(ステップS5、S9、S21〜S37)と、ワーク40と同様の基準点が設定された設計値通りの理想ワークを、該基準点のうちの一点を位置決めピン12aに合わせた所定の姿勢で配置したと想定して、該理想ワーク上の基準点とワーク40の基準点の測定結果とを比較する比較工程(ステップS38)と、比較結果に基づいて、ワーク40上の測定点を測定するための前記ロボットの測定位置を補正する補正工程(ステップS6、S10、S41)と、補正した測定位置から、ワーク40上の測定点を測定する第2測定工程(ステップS42〜S48)と、を有する三次元ワーク測定方法。
(もっと読む)
座標変換関数の補正方法
【課題】測定対象物の正確な3次元形状測定を行うために、精度のよい座標変換関数を計算することが可能な座標変換関数の補正方法を提供する。
【解決手段】カメラ座標系の各座標軸の向きと基準座標系の各座標軸の向きとを一致させた状態で、両座標系の2つの座標軸に対してそれぞれ平行に3次元形状測定装置30を移動させ、各移動方向においてそれぞれ少なくとも2つの位置で基準球60の3次元形状を測定する。そして、各移動方向ごとに座標変換関数によって座標変換された基準球60の中心座標を定点として計算し、各移動方向ごとの各定点によって基準座標系に定義される直線の傾きを計算する。この各移動方向ごとに直線の傾きに応じて第1座標変換関数を座標回転関数M’を用いて補正した後、この補正された第1座標変換関数によって座標変換された定点を用いて第1座標変換関数の座標移動関数を補正する。
(もっと読む)
1 - 20 / 25
[ Back to top ]