
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
1 - 20 / 367
形状評価方法、形状評価装置、プログラム及び記録媒体
入力判別装置
トンネル切羽の整形システムおよび整形方法
状態検出装置、電子機器及びプログラム
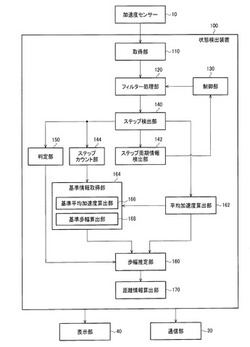
【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
表面形状の特徴形状抽出演算方法、及び表面形状補正演算方法

【課題】 様々な表面形状に対して比較的に容易に適用可能な特徴形状抽出演算方法及び表面形状補正演算方法を提供することを目的とする。
【解決手段】 この方法は、表面形状測定装置によって測定された被測定物の表面形状を表わす表面形状測定データ点群から、該被測定物の表面形状の所要の特徴形状を表わす特徴形状データ点群を抽出する特徴形状抽出演算方法であって、前記表面形状測定データ点群によって構成される仮想表面に接触可能な二次元もしくは三次元の形状を有する仮想接触子を想定し、前記仮想表面における複数の異なる位置において該仮想接触子を該仮想表面に接触させたことを仮想したときに、各位置において該仮想接触子が接触する前記仮想表面上の1以上の接触点における前記表面形状測定データ点群の中のデータ点を抽出して前記特徴形状データ点群とする特徴形状抽出演算方法である。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法
【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
反射型マスクの製造方法および半導体集積回路装置の製造方法
【課題】波長が13.5nm付近の極端紫外(Extreme Ultra Violet:EUV)光を露光光源とする反射型マスクの欠陥修正技術を利用した半導体集積回路装置の製造技術を提供する。
【解決手段】位相欠陥211が生じている開口パターン204の近傍の吸収層203に、開口パターン204よりも微細な開口径を有する補助パターン301を形成する。この補助パターン301は、ウエハ上のフォトレジスト膜に開口パターン204を転写する際の露光光量を調整するためのパターンである。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
接触面形状測定装置
【課題】柔軟な物体同士の接触面の形状をより正確に測定できる測定装置を提供することを目的とする。
【解決手段】本発明にかかる接触面形状測定装置100は、柔軟な物体102、104同士の接触面106の形状を測定する測定装置において、接触面に沿って配置される柔軟性を有する基板108と、基板に貼付され貼付位置での基板の歪量を測定する2つ以上の歪センサ110と、歪量に基づいて曲率を算出し、該曲率に基づいて、2つ以上の歪センサが貼付された経路に沿った接触面の形状を近似した曲線を算出する形状近似部120と、基板上の経路に配置され配置位置での基板の傾斜角を測定する少なくとも2つの加速度センサ112と、いずれかの加速度センサの配置位置における近似した曲線の接線角と測定した傾斜角との差分を算出する比較部122と、差分が所定の値以内に収まるように、近似した曲線を補正する補正部124とを備えることを特徴とする。
(もっと読む)
操舵角センサ
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
3次元寸法測定方法
【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システム
【課題】足底圧の計測において荷重が検出されない欠損部分がある場合でも足底の重心バランスの偏りを常に精度よく判定できる足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システムを提供する。
【解決手段】足底圧の圧力分布を計測する足底圧計測センサ20、足を撮像するテレビカメラ30、処理装置40を備え、足底圧データ取得部41により足底圧データを取得し、足画像取得部42により足画像を取得し、足外形寸法演算部44により足の外形位置を検出して足の外形寸法を演算し、足底重心位置演算部43により、検出された足の外形位置を基準とした足底重心位置を演算し、重心バランス判定部45により足底重心位置と足外形寸法とに基づいて重心バランスの偏りを判定する。また、足の症状判定部46により足の症状を判定し、選定部47により重心バランスの偏りと足の症状に基づいて靴またはインソールを選定する。
(もっと読む)
定形体群の立体配置状況解析方法
【課題】定形体群の立体的な配置を高精度に把握することができ、これにより定形体群の断面解析、時差比較解析などを高精度に行える定形体群の立体配置状況解析方法を提供する。
【解決手段】定形体群へ測定波を発し、3次元多点群と多数の3次元ポイントデータとを取得し、次に、3次元多点群を構成する3次元ポイントデータの中から定形体と推定される領域を順次抽出し、その後、あらかじめ取得した3次元定形体モデルを、抽出した定形体の推定領域に、画像サイズと位置とを3次元的に一致させて順次挿入する。全挿入後、定形体群の3次元CGを3Dディスプレイまたは2Dディスプレイに立体表示するので、定形体群の立体的な配置を測定誤差の影響を小さくして高精度に把握でき、定形体群の断面解析、時差比較解析などを高精度に行える。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
鋼管湾曲量測定装置及びその方法
【課題】容易かつ高精度に、鋼管の湾曲量を測定することが可能な鋼管湾曲量測定装置を提供する。
【解決手段】鋼管湾曲量測定装置2は、レーザ光照射装置20を保持し、鋼管10の表面に固定して配置する固定側保持体21と、目盛りMを付したスケール部材22を保持し、鋼管10の表面上を軸方向に移動させて所定の測定位置に配置する移動側保持体23とを備える。固定側保持体21と移動側保持体23は、鋼管10の外周面に当接した際に鋼管10の当接した箇所の軸方向に対する向きが特定の一の向きとなる形状に構成されている。固定側保持体21と移動側保持体23とを鋼管10の外周面に当接させた状態で、レーザ光照射装置20の光軸Aの方向、及びスケール部材22の目盛りMの臨む方向が、それぞれ鋼管10の前記当接した箇所の軸方向と平行になるように保持する。
(もっと読む)
電極厚さ変化測定装置
【課題】充放電時における正極および負極それぞれの厚さ変化を個別に測定することができる電極厚さ変化測定装置の提供
【解決手段】本発明に係る電極厚さ変化測定装置100は、充放電時における正極または負極の厚さ変化を測定する装置であり、第一硬質平板1と、第一電極2と、測定電極台座3と、第二電極4と、第二硬質平板(電極押さえ)5とを順に積層した積層体を電解質と接触する状態で密閉した電極厚さ変化測定用セル10と、第一電極に荷重を付加する荷重負荷手段11と、第一リード12および第二リード13を介して、電極厚さ変化測定用セル10内の第一電極(図示しない)および第二電極(図示しない)に電気的に接続され、充放電を行う充放電装置14と、第一電極の充放電時の変位を測定する変位計15とを備え、測定電極台座3と第二硬質平板5との間隔は、第二電極4が膨張しても変化しない構成となっている。
(もっと読む)
摩耗検査装置
【課題】粉体を含む気体の流れ(粉流体)と接触する粉粒体接触部材の粉体エロージョンを運転中にモニタリングできる摩耗検査装置を提供する。
【解決手段】粉体を含む気体の流れである粉流体と接触する粉流体接触部材に生じる粉体エロージョンを運転中にモニタリングする摩耗検査装置30が、粉流体の主流路から分岐して再度合流するように接続したモニタリング流路27の途中に形成されて粉流体接触部材と同材質の供試材31を設置する中空本体部32と、中空本体部32の内部に導入して供試材31に向けて噴射される粉流体の流速を加速するオリフィス33と、供試材31の摩耗状態をモニタリングする超音波センサ34と、を具備して構成されている。
(もっと読む)
厚さが変動する回転するブレードの位置を測定するシステムおよび方法
【課題】回転するブレード先端部と筐体の間の半径方向クリアランスの正確な測定が可能なシステムおよび方法を提供する。
【解決手段】センサは、複数の既知軸方向位置、ブレードの厚さおよびブレード先端部と筐体の間の機械的に測定された半径方向クリアランスについて回転するブレードに較正が可能である。後の作動で、ブレード通過信号の幅および回転するブレードの速度を測って回転可能なブレードの厚さを測定することが可能であり、回転可能なブレードの厚さは、センサに対する回転するブレードの軸方向位置と関連付けることが可能である。測定された軸方向位置は、それから、回転するブレードと筐体の間の正確な半径方向クリアランスを測定するため、格納されたセンサ較正データと比較される。
(もっと読む)
長尺体の直線度の経時変化を把握する方法、システム
【課題】長尺体の直線度の経時変化を把握する方法およびシステムを提供すること。
【解決手段】長尺体の直線度の経時変化を把握する方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S3)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S4)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S5)と、定期的に前記移動体を移動させ、その都度前記情報処理部が前記情報処理し、該情報処理した結果の経時変化を、記憶部が記憶する記憶工程(S6)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度測定装置、長尺体の直線度測定方法
【課題】長尺体の直線度を容易に測定することを考慮した直線度測定装置を提供すること。
【解決手段】長尺体13の直線度測定装置1は、第1直線ガイド部材2と、第2直線ガイド部材3と、移動体4と、角速度センサー(5)と、情報処理部10と、測定対象の長尺体13と前記第2直線ガイド部材3とが一つの直線軸を形成するように、前記測定対象の長尺体13を取り付け可能な取り付け部11と、を備え、前記移動体4が、前記第1直線ガイド部材2と前記長尺体13とにガイドされて一の方向へ移動し、前記移動体4が移動している間の前記角速度センサー(5)の姿勢の変化の情報と前記長尺体13における移動中の前記角速度センサー(5)の位置との関係を、前記情報処理部10が関連づけして情報処理することにより前記長尺体13の直線度を測定する構成であることを特徴とする。
(もっと読む)
1 - 20 / 367
[ Back to top ]