
Fターム[2F069DD08]の内容
測定手段を特定しない測長装置 (16,435) | 目的 (603) | 誤動作防止 (26)
Fターム[2F069DD08]に分類される特許
1 - 20 / 26
スティックスリップ検出装置および検出方法
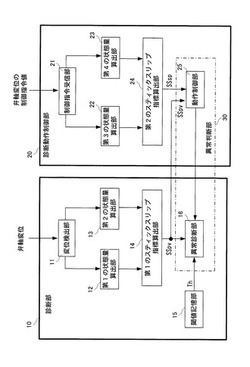
【課題】スティックスリップの誤検出を高精度で抑制する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
(もっと読む)
移動体の障害認識方法及び障害認識システム

【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 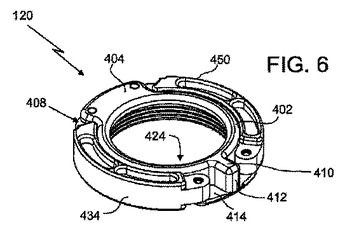 (もっと読む)
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
座標位置決め装置用測定プローブシステム
【課題】関連ユニットの真正性を確認するための認証モジュールを備えた測定システムを提供する。
【解決手段】物体を測定するための測定部と、関連ユニットからデータを受信および/またはこれにデータを送信するためのデータ伝送部とを具えた接触トリガー測定プローブ。測定機器はまた、関連ユニットの真正性を確認するための認証モジュールをも具えている。この認証モジュールは、一方向性ハッシュアルゴリズムを実行するためのプロセッサを含むことができる。真正性は、チャレンジ・レスポンス認証処理を用いて確認することができる。
(もっと読む)
車両用舵角推定装置
【課題】2輪の回転速度に基づいて、定常状態の判定を全操舵角で正確に行い得ると共に、定常状態でない場合においても、できる限り舵角の推定を行い得る車両用舵角推定装置を提供する。
【解決手段】車両の操舵系に操舵補助力を付与するモータのモータ回転角を検出するモータ回転角センサと、車両の左右輪の車輪回転速度を検出する車輪回転速度センサと、前記車輪回転速度センサからの車輪回転速度に基づいて前記操舵系の舵角を推定する舵角推定手段とを具備した車両用舵角推定装置において、前記舵角推定手段で推定された推定舵角を、前記モータ回転角を前記操舵系の減速比で除算した相対舵角と比較することによって、実際の舵角を推定して出力する舵角出力手段を設ける。
(もっと読む)
信号処理装置
【課題】車両が安定走行状態にある時、車高センサやロール角速度センサ等の車両の姿勢状態を検出するセンサの出力信号から、路面の凹凸等の影響による信号雑音を十分に除去することが可能な信号処理装置を提供する。
【解決手段】操舵角・操舵角速度測定部21が、車両1の操舵角X(t)を測定し、操舵角X(t)から操舵角速度Y(t)を算出する。そして、走行状態判定部22が、操舵角X(t)及び操舵角速度Y(t)に基づき車両1の走行状態STSを判定する。この結果、車両1が安定して走行していると判定された時、カットオフ周波数設定部23が、カットオフ周波数Fを信号雑音除去用の低周波数FLに設定し、車両1が安定して走行していないと判定された時、カットオフ周波数Fを位相遅れ防止用の高周波数FHに設定する。そして、ローパスフィルタ24が、車高センサ10L及び10Rの車高変位信号HL(t)及びHR(t)中のカットオフ周波数F以下の周波数成分(HLf(t)及びHRf(f))だけをそれぞれ通過させる。
(もっと読む)
内燃機関のクランク角度検出装置
【課題】欠け歯部の誤検出を防止し、クランク角度の基準位置を正確に特定することを可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121、該信号板121の外周に所定角度離して配設され、被検出部が通過する毎に、それぞれ第1信号SGT1と第2信号SGT2を発生する第1信号発生手段122と第2信号発生手段123、第1信号と第2信号の状態から欠け歯部を検出して基準クランク位置を特定する基準クランク位置特定手段、クランク軸の回転方向を判定するクランク軸正回転判定手段を備え、被検出部の等間隔部の角度の1/2を基準被検出部間角度とし、前記所定角度を、基準被検出部間角度より大きく且つ整数倍以外に設定すると共に、クランク軸正回転判定手段が正回転と判定している時のみ基準クランク位置を特定するようにしたもの。
(もっと読む)
車両のロール警報装置及びロール警報方法
【課題】 簡単な処理によって車両の走行状態に応じた最適時にロール警報を発する。
【解決手段】 車速センサ22は車速を検出し、傾き量算出部20は車両の車幅方向の傾き量を算出する。継続上限時間記憶部24には傾き継続時間の上限値が車速に対応して予め記憶され、傾き量判定部21は、ロール警報設定値をロール警報設定値記憶部19から取得し、傾き量算出部20が算出した傾き量がロール警報設定値を超えたか否かを判定する。タイマ26は、傾き量がロール警報設定値を超えたと傾き量判定部21が継続して判定しているとき、その継続時間を計数する。継続時間判定部25は、車速センサ22が検出した車速に対応する傾き継続時間の上限値を継続上限時間記憶部24から取得し、タイマ26の計数値が上限値に達したか否かを判定する。警報器23は、タイマ26の計数値が上限値に達したと継続時間判定部25が判定したとき、運転者に対して警報を発する。
(もっと読む)
車両のロール警報装置及びロール警報方法
【課題】 簡単な処理によって車両の走行状態に応じた最適時にロール警報を発する。
【解決手段】 車速センサ22は、車両の車速を検出する。傾き量算出部20は、左右のハイトセンサ16,17からの検出値に基づき、車両の車幅方向における傾き量を算出する。ロール警報設定値記憶部19には、ロール警報設定値が車速に対応して予め記憶されている。判定部21は、車速センサ22が検出した車速に対応するロール警報設定値をロール警報設定値記憶部19から取得し、この取得したロール警報設定値を、傾き量算出部20が算出した傾き量が超えたか否かを判定する。警報器23は、傾き量がロール警報設定値を超えたと判定部21が判定したとき、車両の運転者に対して警報を発する。
(もっと読む)
超小型電子機構の所望寸法を測定するのに用いられる計測ツールにおける障害を識別する方法、該寸法を測定するのに用いられる計測ツールシステムにおける障害を識別する方法、及び、該システムにおける障害を識別するコンピュータプログラム(計測ツールエラーログ解析方法及びシステム)
【課題】超小型電子機構の所望寸法を測定するのに用いられる計測ツールシステムの障害を識別する方法を提供する。
【解決手段】システムの各計測ツールは超小型電子機構の所望寸法を測定するため、複数のレシピを実行し、各レシピは、超小型電子機構の少なくとも1つの寸法を測定するために一連の命令を含む。システムは、超小型電子機構寸法の測定の際に障害を記憶するエラーログを含む。方法は、計測ツールにより用いられたレシピに対して、正規化された数のエラーを、エラーログに記憶されている障害から決定する工程と、エラーログ内の最大の正規化された数のエラーを有する1つ以上のレシピを識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピを、測定ツールにより実行すべきジョブのリストにて識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピから1つ以上のレシピのエラーの原因を決定する工程とを含む。
(もっと読む)
製品搬送台車、ロボット位置計測システム及びその計測方法
【課題】 製造ラインにおけるロボットの作業点を高精度で計測するとともに、作業性及び安全性の向上を図る。
【解決手段】 作業対象製品を載置して搬送レール上を搬送する製品搬送手段10を所定位置に停止させる。作業対象製品の設計指定位置9を目標に製品製造用ロボット12の作業部15を移動させ、製品搬送手段10に固定設置された計測手段11により上記ロボット12の作業部15の位置を計測する。そして、ロボット12の作業部15の位置と設計指定位置(指定点9)との誤差を計算し、その誤差に基づいて、ロボット12の作業部15の位置が設計指定位置に一致するようロボット12に対し補正指示を出す。
(もっと読む)
光学フィルム検査方法および検査装置
【課題】 連続搬送される長尺光学フィルムを連続的に精度よく検査することができるフィルム検査方法および検査装置を提供する。
【解決手段】 光学フィルム検査装置は、光学的入力手段2を移動させる駆動手段10と、フィルム被検査箇所Tの検査用基準位置からの変位量を計測する変位量計測手段4と、変位量計測手段4の出力に応じて光学的入力手段2の駆動量を決定する駆動量決定手段11とを備えている。
(もっと読む)
走査型プローブ顕微鏡
【課題】 新規なカンチレバー供給機構及びカンチレバー取り付け方法を得る。
【解決手段】 探針を有するカンチレバー1を保持する粘着性弾性材料20aを有するカンチレバー供給機構20を備える。粘着性弾性材料20aは、カンチレバー取り付け部2がカンチレバー1に対して物理的に接触する際の干渉を弾性変形として吸収し、両者を密着させる部材である。カンチレバー取り付け部2は、カンチレバー1を吸着固定させることで取り付ける部材であり、粘着性弾性材料20aに保持されたカンチレバー1と密着した後、カンチレバー1を吸着固定し、所定位置へ移動する。
(もっと読む)
寸法測定システム、寸法測定装置及びマスタ
【課題】 マスタを間違えた誤った校正処理を防止できる寸法測定システムの実現。
【解決手段】 寸法測定装置10と、所定の寸法値の部分を有する複数のマスタ50A,50Bとを備え、所定の寸法値の部分を測定して寸法測定装置を校正する寸法測定システムであって、各マスタは、寸法測定装置がマスタの所定の寸法値の部分を測定する状態にあることを検出する測定状態検出手段55と、寸法測定装置が所定の寸法値の部分を測定する状態にあることを検出したことを示す測定状態信号を送信する無線通信手段とを備え、寸法測定装置は、測定状態信号を受信する無線通信手段37を備え、無線通信手段が測定状態信号を受信している時に校正処理を行う。
(もっと読む)
シリンダボアの測定方法及び測定装置
【課題】エンジンのシリンダボアの真円度あるいは円筒度を測定する際、実際のエンジンの作動状態に近似させた状態で測定を行い、エンジンの作動状態における正確な真円度の測定データを得る。
【解決手段】測定するエンジンのシリンダブロック1とシリンダヘッド3とを締結ボルト4により組み付けて組立体9とする。これをシリンダブロック1が上側となるように設置し、両方のウォータジャケットに高温の流体を送り込む。この状態で測定装置20を組立体9の上方からシリンダボア2に挿入して測定することにより、エンジンの作動時の状態を再現し、内部応力や熱膨張の影響を反映した真円度を測定することができる。測定装置20には、位置決めのため、シリンダボア2と合致する第1基準部材21と、シリンダブロック1の主軸受部7に合致する第2基準部材とが設けられる。
(もっと読む)
円筒形状の測定方法及び測定装置
【課題】 移動手段の走査動作隙間を検出して変位検出器の値を補正し、前記走査動作の機械的正確さを追求することに負荷を必要としない高精度の測定方法を提供する。
【解決手段】 円筒体を中心軸回りに回転させ、前記中心軸直角断面上に配置され、円筒体の表面変位を計測する変位検出器を移動手段により前記中心軸方向に移動させ、前記変位検出器から得られた所定の位置での複数の検出信号を演算して円筒形状を測定する方法において、前記変位検出器は、第1の変位検出器と、前記第1の変位検出器の移動方向と反対に配置された第2の変位検出器とを有し、前記第2の変位検出器によって前記第1の変位検出器と同一の点を測定し、それぞれの測定値の差から前記移動手段の走査動作隙間を検出して前記第1の変位検出器の値を補正する。
(もっと読む)
走査型プローブ顕微鏡
【課題】 漏れ光の影響を受けることなく、試料の電気的物性を高精度に測定すること。
【解決手段】 先端に探針2を有するカンチレバー3と、該カンチレバー3を支持する支持部4と、カンチレバー3の変位量に応じて抵抗値が変化するピエゾ抵抗素子5とを有する自己検知型プローブ6と、ピエゾ抵抗素子5を流れる電流値を検出してカンチレバー3の変位量を検出する検出手段と、試料を載置する試料台と探針2とを、XY方向及びZ方向に相対移動させる移動手段と、探針2と試料表面との距離が一定になるように移動手段を制御すると共に試料Sの表面形状を測定する制御手段と、探針2と試料表面との間に所定の電圧を印加する印加手段と、印加された電圧に起因する電気物性情報を測定する測定手段とを備え、探針2が、カンチレバー3の基端側まで延びると共に測定手段に電気的接続可能な導電膜28に電気的に接続されている走査型プローブ顕微鏡を提供する。
(もっと読む)
傾斜角度計測装置
【課題】 傾斜角度検出手段の出力が飽和することに起因して、その飽和状態からの復帰後も演算手段の演算による傾斜角度が異常値を示すことを回避する。
【解決手段】 移動体Aの傾斜角度を検出する傾斜角度検出手段45の出力と、その傾斜方向での移動体Aの角速度を検出する角速度検出手段46の出力とに基づいて、移動体Aの傾斜角度を演算する演算手段48を備えた傾斜角度計測装置を、予め設定した閾値に基づいて傾斜角度検出手段45が飽和状態か否かを判別し、傾斜角度検出手段45が飽和状態でない場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を行って、角速度検出手段46の出力に基づく演算値を更新し、傾斜角度検出手段45が飽和状態である場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を停止して、角速度検出手段46の出力に基づく演算値を固定するように構成した。
(もっと読む)
端子の平坦度測定方法
【課題】この発明の目的は、画像処理を用いないで照射光の影響を受けないで済み、しかも被検査物に余分な負荷をかけないで正確な平坦度の測定ができるようにした端子の平坦度測定方法を提供することにある。
【解決手段】ワーク台に搭載した、側面に多数の金属端子を設けた非検査物における金属端子の平坦度を測定するに当たり、
金属端子と同数のスイッチング機能を備えたコンタクトプローブを、駆動機構により金属端子に向けて前進させ、
コンタクトプローブを金属端子に接触させてそのスイッチング機能を作動させ、
基準面から金属端子にコンタクトプローブが接触してスイッチング機能が作動した位置までの距離を測定するようにしたことを特徴とする端子の平坦度測定方法。
(もっと読む)
1 - 20 / 26
[ Back to top ]