
Fターム[2F069DD15]の内容
測定手段を特定しない測長装置 (16,435) | 目的 (603) | 測定速度の向上 (91)
Fターム[2F069DD15]に分類される特許
1 - 20 / 91
膜厚測定方法および膜厚測定装置、半導体集積回路の製造方法、制御プログラム、可読記憶媒体
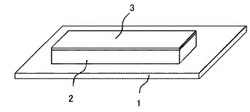
【課題】電子部品の電極の導電性積層膜の膜厚を安価な装置で高速に測定する。
【解決手段】絶縁膜1上に上下に積層された導電層2,3(積層膜、例えばNi層およびその上のAu層)からなる半導体基板の電極に対して、段差を触針で測る場合やレーザ光を用いる場合など公知の方法で導電層2,3の厚さ(電極高さ)を測定するステップと、4端針法により電極の表面抵抗を測定するステップとを有し、二つのステップから得られた積層膜の膜厚(電極高さ)と表面抵抗値から、上下に積層した導電層2,3からなる電極の上部皮膜である導電層3の膜厚を計算式から算出する。
(もっと読む)
多点検査装置と方法

【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 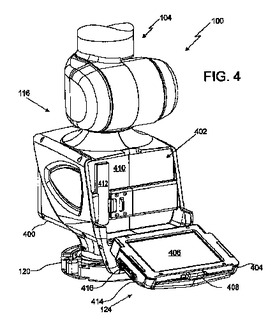 (もっと読む)
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
面形状測定機、面形状測定方法、及び面形状の測定値の解析方法
【課題】軸を中心として回転対称な非球面部材における非球面の輪郭形状の測定において、軸を挟んだ対称な有効径の範囲全体を対象とすることなく、短い時間で輪郭形状の誤差を高精度に測定可能な面形状測定機、測定方法及び面形状の測定値の解析方法を提供する。
【解決手段】軸Aを挟んだ非対称な範囲Mにおいて、軸Aの一方の側の所定位置から他方の側の別の所定位置までの非球面の輪郭形状を測定し、範囲Mにおける非球面の輪郭形状の測定値を用いて、測定値を得ていない軸Aを挟んだ他方の側の所定範囲に仮測定値として補完し、次いで、軸Aを挟んだ非対称な範囲と仮測定値を補完された範囲とを合わせた範囲において、測定値と仮測定値と非球面の輪郭形状の設計値とを用いて、所定の収束条件を満たすまで収束計算を行なうことにより、非球面の輪郭形状の誤差を算出する。
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
ステアリング角度測定装置及びそのセット方法
【課題】セット時間の短縮化を図ることができるステアリング角度測定装置及びそのセット方法を提供する。
【解決手段】測定器本体2に第1、第2アーム14,15を設け、第1アーム14は測定器本体2に移動可能とし、第1アーム14をその先端側が測定器本体2から遠ざかる方向に弾性力を発揮するばね23を設けた。第1、第2アーム14,15の先端側にはステアリングホイール50の円弧状空隙7に沿って回動して測定器本体2を案内するローラを設け、バッテリ箱24を含む測定器本体2の重心を、第1、第2アーム14,15の軸心17より下方に設定した。仮に、第1、第2アーム14,15の軸心17が水平でなく、測定器本体2が傾斜して配置された場合でも、測定器本体2にかかる重力の影響を受けて、測定器本体2が円弧状空隙壁部8に沿って回動して、所定の位置に保持される。
(もっと読む)
検査装置
【課題】測定試料を変えるたびごとに測定点の位置補正を行う必要がなく、更に、測定試料上の同一点についての複数種類の特性の測定を、同一検査装置を用いて行なうことができる検査装置を提供する。
【解決手段】試料を載置するためのステージ3と、1又は複数の検査機器6、7を支持可能な検査機器支持用ヘッド5と、ステージ及び/又は検査機器支持用ヘッドを支持している移動機構23、43と、ステージ上の基準点の実座標と目標座標との偏差を格納する偏差格納部と、複数の検査機器の測定点間のオフセット値を格納するオフセット値格納部と、格納された偏差及びオフセット値を参照して、複数の検査機器のうちのいずれか1つの検査機器の測定点と他の検査機器の測定点とが一致するように、ステージ及び/又は前記検査機器支持用ヘッドを移動させる位置制御部と、を備えている。
(もっと読む)
原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボット
【課題】関節部を介して回動自在に支持されたリンクの原点位置を設定するのに好適な原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、回転関節14の回転軸周りに脚部12と共に回動する第1ドグ200及び第2ドグ202と、脚部12の基準回転角度位置へと回動した第1ドグ200を検出する基準位置検出センサ210と、脚部12の一方の回動方向の限界回転角度位置へと回動した第2ドグ202を検出する限界位置検出センサとを備え、回転関節14を回転して脚部12をその初期位置から最初に限界位置検出センサの配設位置方向に回動させると共に、仮の原点位置を検出する際の第1ドグ200の基準位置検出センサ210の検出位置への進入方向を揃え、更に、仮の原点位置と、その検出範囲と、エンコーダの発生するパルス信号とに基づき原点位置を設定する構成とした。
(もっと読む)
ベルマウス模型の3次元計測を用いてベルマウスの図面を製作する方法
【課題】ベルマウス模型の3次元計測を用いることによって、ベルマウス図面の精密な製作と同時に図面製作時間の短縮を可能にするベルマウス模型を用いたベルマウス図面製作方法を提供する。
【解決手段】実際のベルマウスの模型の3次元計測を用いることによって実際のベルマウスの図面を製作する方法であって、実際のベルマウスから縮尺したベルマウス模型を複数の断面に分割するステップと、縮尺したベルマウス模型の複数の断面を複数の曲線で表示するステップと、複数の曲線の座標を計測するステップと、計測された座標を利用してベルマウス模型の複数の断面図を形成するステップと、断面図を拡大することによって実際のベルマウスの図面を製作するステップとを含む方法が提供される。
(もっと読む)
テーブル位置決め装置
【課題】高精度位置決めを迅速かつ安定して行なえるようにする。
【解決手段】 ボールねじ軸(リード1mm)を利用した全域回転駆動型でかつテーブルを最小1nmずつ移動可能で、3つの光学格子(明・暗線が2μm)を用い信号分割数を2000として1nm/1パルスの移動変位量検出信号を生成でき、オープンループ制御による高速回転とクローズドループ制御による中速回転および低速回転をこの順序で切換えて位置決めでき、低速回転中にインポジション範囲内であることを確認して迅速停止可能に形成されている。
(もっと読む)
1 - 20 / 91
[ Back to top ]