
Fターム[2F069DD27]の内容
測定手段を特定しない測長装置 (16,435) | 目的 (603) | 軽量化;小型化 (40)
Fターム[2F069DD27]に分類される特許
1 - 20 / 40
位置計測装置及び位置計測システム
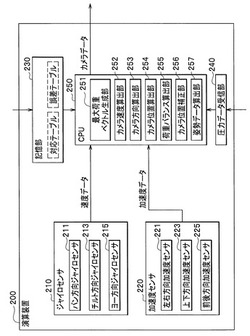
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
座標測定機

【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
筒状部材およびこの筒状部材からなる測定機・装置の構成部材
【課題】 従来よりもさらに軽量化可能な筒状部材およびこの筒状部材からなる測定機・装置の構成部材を提供する。
【解決手段】 セラミックスからなる複数の板材2で構成された筒状部材1であって、板材2のうち少なくとも一つが中空部3を有している筒状部材1である。この筒状部材1は、軽量化することができ、この筒状部材1を測定機・装置の構成部材として用いれば、移動の高速化や位置決めの高精度化に対応することができるとともに、自重で撓むことが少ないので、構成部材の更なる大型化や長尺化に対応することができる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
携帯機器および設置可否判定方法
【課題】 設置対象物の寸法測定機能を有する携帯機器、および、その携帯機器を使っての設置対象物の設置予定場所への設置の可否を判定する設置可否判定方法に関し、設置予定場所への設置が可能か否かを事前に通知させる。
【解決手段】 設置対象物の寸法を認識する寸法認識部と、設置対象物の設置予定場所、および設置予定場所へ至る搬送経路上の設置対象物通過の妨げとなり得る箇所の各寸法を記憶する寸法記憶部と、寸法認識部で寸法が認識された設置対象物を、搬送経路を通過して設置予定場所に設置することが寸法的に可能か否かを判定する設置可否判定部と、設置可否判定部での判定結果を通知する判定結果通知部とを有する。
(もっと読む)
相対変位計測方法及び相対変位計測装置
【課題】蒸気発生器の伝熱管と振止部材との相対変位を計測できる相対変位計測方法を提供することにある。
【解決手段】伝熱管と振止部材との間で発生する相対変位を検出する相対変位計測方法であって、伝熱管に配置された距離測定手段により、振止部材に配置されたターゲットとの距離を測定する測定ステップと、測定ステップにより測定した間隔に基づいて、伝熱管と振止部材との相対変位を算出する算出ステップとを有し、振動時の伝熱管の所定位置と振止部材の所定位置との相対変位を計測することで上記課題を解決する。
(もっと読む)
測定機
【課題】輸送制限の問題および精度低下の問題を解決できる測定機を提供すること。
【解決手段】ガイド部2と載置テーブル部5とが振動伝達部材6によって着脱可能に連結されるので、画像測定機をガイド部2、可動部3、および載置テーブル部5等に分割することが可能となり、各部材2,3,5を分割輸送することができる。そのため、輸送制限にかかることなく画像測定機を大型化することが可能となる。また、ガイド部2側で生じた振動も載置テーブル部5側で生じた振動も、振動伝達部材6を介して他方に伝達させることができるので、各側2,5に設けられた測定部と被測定物mとの間の相対振動を抑えることができ、相対振動による精度低下を抑えることができる。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
角度検出装置及び歩数計
【課題】 加速度センサを用いて構成が簡単で信頼性高く、小型化可能な角度検出装置を提供すること。
【解決手段】 各加速度センサ101a、101bは感度軸が相互に直交するように配置されると共に少なくとも動的加速度を検出して対応する検出信号を出力し、CPU108は加速度センサ101a、101bからの検出信号に基づいて、歩数計の筐体の傾きを算出する。CPU108は、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bを決定して該増幅手段からの検出信号に基づいて歩数計数を行い、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bのゲインを最適化し、利用しない増幅手段106a又は106bのゲインを小さくしてSN比及び歩数演算の精度向上を図る。
(もっと読む)
基板測定用ステージ
【課題】支持ピン3の位置再現性を向上させること、及び載置板2と支持ピン3間の移載において基板Wの水平方向のずれを防止することである。
【解決手段】基板Wの反りを測定する反り測定系7、及び当該基板Wの反り以外の物理量又は化学量を測定する通常測定系6に用いられる基板測定用ステージ1であって、前記通常測定系6の通常測定位置P1、及びその通常測定位置P1から下方に離間した退避位置P2の間を移動可能な載置板2と、前記載置板2に設けられた貫通孔21に挿通可能であり、前記反り測定系7の反り測定位置P3に固定された複数の支持ピン3と、前記載置板2を前記通常測定位置P1及び前記退避位置P2の間で昇降移動させる駆動機構と、を備え、前記反り測定位置P3が、前記通常測定位置P1及び退避位置P2の間に設定されている。
(もっと読む)
可動テーブル
【課題】位置合わせ作業が簡単で測定機の計測用基台に対する試料載置台の位置が低く機構が簡単で価格が低廉な可動テーブルを提供する。
【解決手段】可動テーブル10は磁石12の磁力で不図示の計測用基台に固定される。固定前の位置合わせのときは、指で二つの操作レバー18がつままれ、開放位置Fから移動位置Mへ回動される。操作レバー18に一体なシャフト部21が回転し、シャフト部21に形成されているカム部22が逃げ部24から下方に回動してその先端が計測用基台の面を押しやり相対的に天板11を計測用基台から浮き上がらせる。指で二つの操作レバー18をつまんだまま天板11を所望の方向へ移動させて位置決めし、指を離すと磁石12の磁力で天板11が計測用基台の面に密着して固定される。
(もっと読む)
絶対位置測定装置
【課題】小型化を容易に図れ、製造上の負担を軽減でき、スピンドルの絶対位置を測定可能な絶対位置測定装置を提供すること。
【解決手段】スピンドル3の回転量を第1の周期で変化する位相信号として検出する第1のロータリーエンコーダと、スピンドル3の回転量を第2の周期で変化する位相信号として検出する第2のロータリーエンコーダとを備える。第1のロータリーエンコーダの第1のロータ42の回転は、第1の回転円筒43の外周に形成された第1の歯車48と、第2の回転円筒52の外周に形成された第2の歯車55とに噛合する中継歯車53によって、第2のロータ51に伝達される。従って、二つの異なる周期の位相信号に基づいてスピンドルの絶対位置を算出できる。また、従来のようなスピンドルの螺旋状のキー溝を設ける必要がなく、小型化を容易に図れる。また、製造上の負担を軽減させることができる。
(もっと読む)
シリンダボアの測定方法及び測定装置
【課題】エンジンのシリンダボアの真円度等を測定する際、シリンダヘッドとベアリングキャップ部材とをシリンダブロックに締結し、実際のエンジンの作動状態に近似させた状態で測定を行って、エンジンの作動状態における正確な真円度の測定データを得る。
【解決手段】測定するエンジンのシリンダブロック1に、シリンダヘッド3とベアリングキャップ部材とをボルトにより組み付けてシリンダ組立体9とする。これをベアリングキャップ部材8が上側となるように設置し、ウォータージャケットに高温の流体を送り込む。この状態で測定装置20を組立体9の上方からシリンダボア2に挿入して測定することにより、エンジンの作動時の状態を再現し、内部応力や熱膨張の影響を反映した真円度を測定することができる。測定装置20を設置するため、主軸受部には載置ブロック21が掛け渡され、位置決めのため、シリンダボア2と合致する基準部材22が設けられる。
(もっと読む)
ステージシステム及びステージシステムの補正方法
【課題】ステージの左右の歪みを短時間で補正する。
【解決手段】互いに平行となるように離間配置し、移動体2の対向する面に配された一対のガイド軸22,32と、ガイド軸22,32のうち一方のガイド軸22に設けられ移動体2の一側部2aを一方のガイド軸22に沿って移動させる第1の搬送機構20と、ガイド軸22,32のうち他方のガイド軸32に設けられ移動体2の他側部2bを他方のガイド軸32に沿って移動させる第2の搬送機構30と、移動体2の一側部2aを一方のガイド軸22に沿って基準位置まで移動させたとき、移動体2の他側部2bの所定位置からのずれ量を検出する検出部40とを備える。
(もっと読む)
3次元形状測定システムおよび3次元形状測定方法
【課題】簡単かつ小型な構成で測定対象物の3次元形状を測定することが可能な3次元形状測定システムを提供する。
【解決手段】3次元形状測定システムは、引き出されるワイヤ21A,21B,21Cの引出し量Lおよび同ワイヤ21A,21B,21Cの引き出される方向を表す回転角θx,θzをそれぞれ検出可能なワイヤ装置20A,20B,20Cを備える。各ワイヤ21A,21B,21Cの各先端部21aA,21aB,21aCは、3次元形状測定装置10の背面に接続されている。3次元画像データ処理装置43は、3次元形状測定装置10による測定時におけるワイヤ21A,21B,21Cの引出し量Lおよび回転角θx,θzを用いて座標変換関数FPSを計算する。そして、各測定位置ごとに生成される3次元形状データを予め記憶している座標変換関数FCPと計算した座標変換関数FPSとを用いて座標変換する。
(もっと読む)
スプロケットの回転角を検出する装置
【課題】スプロケットの回転角を高精度かつ省スペースで検出することができる装置を提供する。
【解決手段】スプロケット23の回転角毎に異なる態様に変化するパターン形成面27aをスプロケット23に備え、スプロケット23の回転角毎に変化するパターン形成面27aの態様を複数のフォトセンサ27dにより検知し、フォトセンサ27dによる検知信号の組み合わせに基づいて対角検出部27cによりスプロケット23の絶対回転角を検出する。
(もっと読む)
検出装置
【課題】使用者が使い易く、安価で小型化された変位計などの検出装置を提供する。
【解決手段】7セグメントLED42は、対象物の測定値等を表示する。バー表示部43は、測定値が許容範囲のどの位置に入っているかという入り度合いを表示する発光ダイオード(LED)等からなる複数のバー(セグメント)43a、上限値表示部43b、および下限値表示部43cを含む。使用者により設定された許容範囲の上限値および下限値から、使用者が暗に望むある程度の分解能を予測することができる。そこで、本発明では、各バー43aの分解能を、(上限値−下限値)/個数により定義する。なお、上記個数とは、上限値表示部43bと下限値表示部43cとの間にあるバー43aの個数を示す。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
荷重変位算出装置および荷重変位算出方法
【課題】装置構成の小型化・簡素化を可能としつつ、高い信頼性を有する荷重から変形量を算出するための変換行列を生成可能な荷重変位算出装置を提供する。
【解決手段】荷重変位算出装置1に、対象物を第一の姿勢、第二の姿勢、第三の姿勢で支持する支持手段16・20と、対象物を互いに直交する三つの軸の軸線方向および該三つの軸のいずれか一つの軸の周方向に変形させる変形手段13・14・17・22と、対象物の互いに直交する三つの軸の軸線方向の変形量および該三つの軸のいずれか一つの軸の周方向の変形量を検出する変形量検出手段23・24・25・26と、対象物の互いに直交する三つの軸の軸線方向の荷重および周方向の荷重を検出する荷重検出手段19と、対象物の変形量に係る情報および荷重に係る情報に基づいて対象物の荷重から変形量を算出するための変換行列を生成する変換行列生成手段4aと、を具備した。
(もっと読む)
1 - 20 / 40
[ Back to top ]