
Fターム[2F069EE22]の内容
測定手段を特定しない測長装置 (16,435) | 補正;補償 (408) | 手段 (176) | 電気的 (146)
Fターム[2F069EE22]の下位に属するFターム
補正値、補正係数を記憶しておくもの (85)
Fターム[2F069EE22]に分類される特許
1 - 20 / 61
路面凹凸評価システム
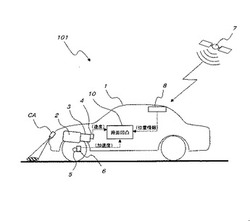
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法

【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
接触面形状測定装置
【課題】柔軟な物体同士の接触面の形状をより正確に測定できる測定装置を提供することを目的とする。
【解決手段】本発明にかかる接触面形状測定装置100は、柔軟な物体102、104同士の接触面106の形状を測定する測定装置において、接触面に沿って配置される柔軟性を有する基板108と、基板に貼付され貼付位置での基板の歪量を測定する2つ以上の歪センサ110と、歪量に基づいて曲率を算出し、該曲率に基づいて、2つ以上の歪センサが貼付された経路に沿った接触面の形状を近似した曲線を算出する形状近似部120と、基板上の経路に配置され配置位置での基板の傾斜角を測定する少なくとも2つの加速度センサ112と、いずれかの加速度センサの配置位置における近似した曲線の接線角と測定した傾斜角との差分を算出する比較部122と、差分が所定の値以内に収まるように、近似した曲線を補正する補正部124とを備えることを特徴とする。
(もっと読む)
情報処理装置および情報処理プログラム
【課題】異常データの影響を低減して、測定領域全体の形状データを高精度に得ることができる情報処理装置を提供する。
【解決手段】本発明の情報処理装置は、形状測定装置により所定領域単位でワークの形状を測定して得られた複数の形状データを取得するデータ取得部と、ワークと形状測定装置との位置姿勢関係を示す位置姿勢情報を取得する情報取得部と、位置姿勢情報に基づいて、各形状データの座標系を共通の座標系に変換する変換部と、共通の座標系における一の形状データの座標を補正して当該形状データが示す領域に隣接する領域の形状データにつなぎ合わせるステッチング処理を行うための補正量を、一の形状データが示す領域と隣接する領域との間で重複する領域の形状データを用いて算出する補正量算出部と、補正量または補正量による補正後の形状データに基づいて、ステッチング処理の信頼度を算出する信頼度算出部と、を有する。
(もっと読む)
表面形状測定装置及び表面形状測定方法
【課題】複数の測定面領域が互いにオーバーラップ領域を持たない場合などでも、複数の面測定データの相対位置関係を高精度に合わせることができる表面形状測定装置及び表面形状測定方法を提供する。
【解決手段】表面形状測定装置10は、光学的表面形状測定機11と触針式検出器22などの高さ測定機を備え、光学式表面形状測定機11で測定した複数箇所の測定面領域の各面測定データにおける高さ測定点の各測定値の相対的位置関係を、高さ測定機22で測定した前記高さ測定点の各測定値の相対的位置関係に合わせるように前記各面測定データを移動補正する。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
センサクリアランスの電子的自己校正
【課題】多チャネルクリアランスセンサシステムの自己校正システムを提供する。
【解決手段】自己校正システム110は、固定物体と回転物体との間の少なくとも1つのクリアランスパラメータ信号を測定する少なくとも1つのセンサを有する。このセンサからの出力は、クリアランスパラメータ信号のオフセット誤差を求めるよう構成されたオフセット補正部137により、クリアランスパラメータとして処理され、このパラメータは、レベルシフタ120において用いられる。このレベルシフタは、クリアランスパラメータ信号と切替可能に結合されている。レベルシフタからの出力は、増幅及びデジタル変換可能であり、信号レベル解析器154により処理されて、チャネル利得信号が求められる。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
移動体搭載用機器
【課題】加速度センサの取り付け角度に関係なく、正確に移動体搭載用機器の取り付け角度を算出することが可能な移動体搭載用機器を提供する。
【解決手段】移動体の3軸方向への加速度を検出する加速度センサ131と、移動体が停止状態にある際に加速度センサ131から出力される出力信号に基づいて、重力加速度を算出する重力加速度算出部181と、移動体が加減速移動状態にある際に加速度センサ131から出力される出力信号に基づいて、移動体の移動体加速度を算出する移動体加速度算出部182と、算出された重力加速度と算出された移動体加速度とに基づいて、前記移動体に対する移動体搭載用機器の取り付け角度を算出する取り付け角度算出部183と、を備えるように構成する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
測定装置及び測定方法
【課題】被測定物を精度良く測定が可能であるとともに、安価な測定装置を提供する。
【解決手段】長尺な被測定物Aの形状を測定する測定装置であって、ベース1と、前記ベース1の一方側に設けたビーム支持部2と、前記ビーム支持部2の上部にピン軸4によって一方側の両側部を支持し、他端側を傾動及び倒立可能に設けたビーム5と、前記ビーム5の一方端に設けられ、前記被測定物Aの一端を支持及び回転可能する支持部6と、前記ビーム5の他方端に移動可能に設けられ、被測定物の他端をクランプ及び回転可能するクランプ部7と、前記ベース1と前記ビーム5との間に設けたビーム傾動及び倒立用のアクチュエータ8と、前記被測定物Aに対向するように、前記ビーム上に移動可能に設けた寸法測定部10とを備える。
(もっと読む)
幾何学的タイヤ測定値のデータ品質を向上させるフィルタリング処理方法
タイヤ測定システムが生のタイヤ測定データ及び変換タイヤ測定データ(例えば、測定された半径方向又は側方回転振れ値のデータセット)をストレージする種々のメモリ/メディア要素並びにコンピュータ実行可能命令の形態をしたソフトウェアを搭載したコンピュータを含み、コンピュータ実行可能命令をプロセッサによって実行し、それにより、得られたデータセットに含まれていて、隣り合う測定値を超えて突き出ている選択された回転振れ値をフィルタリング処理し、フィルタリング処理済み回転振れ値のうちで、かかる値セット全体を包囲している凸包上に位置する選択されたフィルタリング処理済み回転振れ値を識別し、凸包上に位置する回転振れ値のうちの識別された選択回転振れ値の補間を実行してフィルタリング処理済み回転振れ測定値の最終データセットを得る。逆データセットに対して同様なステップを実行してサイドウォール変形特徴部、例えばサイドウォール窪みを一層適切に検出する。 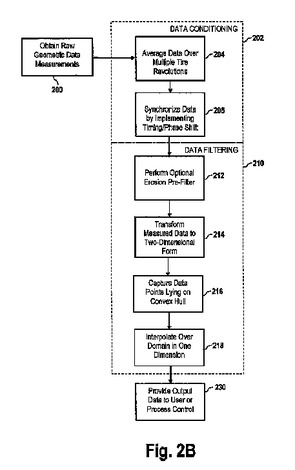 (もっと読む)
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
圧力測定装置及び厚み測定装置
【課題】 平板状の被測定物に生じる体積変化の分布を測定可能な装置を提供する。
【解決手段】 圧力測定装置10は、平板状の被測定物を表裏面から挟持する一対の固定部材2,12と、固定部材12の内側面に設けられているとともに、被測定物と固定部材12の間に生じる圧力分布を検出する圧力センサ8を備えている。圧力測定装置10は、被測定物と固定部材12の間に生じる圧力分布を検出することにより、被測定物に生じた体積変化の分布を測定することができる。
(もっと読む)
姿勢角検出装置
【課題】取付位置にずれが生じたときにも取付部位の姿勢角を正確に検出することができる姿勢角検出装置を提供する。
【解決手段】人体の部位100の姿勢角を検出する姿勢角検出装置10であって、姿勢角センサ20と、移動量検出手段31、32と演算手段60を備えている。姿勢角センサ20は、人体の部位100の表面に取り付けられ、自己の姿勢角を検出する。移動量検出手段31、32は、取付部位100の表面を移動したときの姿勢角センサ20の初期位置からの移動量を検出する。演算手段60は、検出された姿勢角を検出された移動量に基づいて補正する。
(もっと読む)
身長測定装置
【課題】屋外で使用でき正確に測定可能な携帯型の身長測定装置を実現する。
【解決手段】携帯型の身長測定装置であって、装置から床面までの距離を測る第1の超音波センサと、被測定者の胴体までの距離を測る第2の超音波センサと、被測定者の頭部のほぼ先端までの距離を測る第3の超音波センサと、3つの測距情報を用いて被測定者の身長情報を出力する演算処理手段と、超音波センサからの信号を取り込むタイミングを規定するタイミング手段を具える。被測定者は、装置を手に持ち、測定中に鉛直方向に移動させ、第3の超音波センサが被測定者の頭部のほぼ先端を検出した時点において各超音波センサからの出力信号を取り込み、演算処理手段は取り込まれた3つの測距情報に基づいて被測定者の身長情報を得る。頭部のほぼ先端から頭頂までの距離の平均値が性別等に応じて装置に入力されており、この平均値が加算されてより正確な身長を測定できる。
(もっと読む)
ダム堤体の変位計測装置
【課題】ダム堤体の変位を正確に、かつ、低コストに測定することができるダム堤体の変位計測装置を提供する。
【解決手段】ダム堤体の変位計測装置の傾斜計21の測定傾斜角と傾斜計21の周囲の測定温度は記憶部25に記憶される。制御部27は、測定温度から傾斜計21によって測定された傾斜角を補正し、補正された傾斜角から傾斜計21周辺のダム堤体の変位量を産出する。
(もっと読む)
基準板を用いた3次元座標測定機
本発明は、被対象物に対する機械的誤差を実時間で補正しながら被対象物の表面座標を精密に測定することができる構造の基準板を用いた3次元座標測定機に関するもので、被対象物の上方に配置されてX軸ステージ軸上に左右に移動自在な状態で設置される測定部と、測定部の上方に配置されて固定される基準板とを備え測定部が、測定部と基準板との間の距離及び測定部と被対象物との間の距離を実時間で測定してX軸ステージの機械的誤差を補正して精密に測定するように設計されているものである。 (もっと読む)
1 - 20 / 61
[ Back to top ]