
Fターム[2F069EE23]の内容
測定手段を特定しない測長装置 (16,435) | 補正;補償 (408) | 手段 (176) | 電気的 (146) | 補正値、補正係数を記憶しておくもの (85)
Fターム[2F069EE23]の下位に属するFターム
熱膨張係数 (7)
Fターム[2F069EE23]に分類される特許
1 - 20 / 78
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
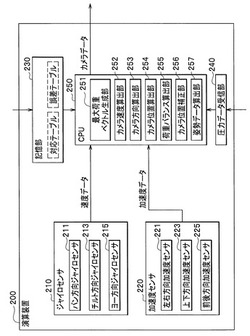
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
多関節型座標測定装置

【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
シート状材料の厚さ測定方法およびシート状材料の搬送装置
【課題】コストを抑えたシート状材料の厚さ測定を行うことを可能としたシート状材料の厚さ測定方法およびシート状材料の搬送装置を提供する。
【解決手段】搬送ベルト12は、シート状材料2の搬送方向と直交する方向に2つに分割された第1、第2の搬送ベルト1202、1204で構成されている。第1、第2の搬送ベルト1202、1204の間には間隙Sが確保されている。シート状材料2は第1、第2の搬送ベルト1202、1204により搬送される。第1、第2の変位センサ16、18は、非接触式であり、第1の搬送ベルト1202と第2の搬送ベルト1204との間隙Sの領域内に位置するシート状材料2の上下に離間して配置され、シート状材料2の上面および下面の変位を検出する。厚さ算出手段20は、第1、第2の変位センサ16、18で検出された上面および下面の変位に基づいてシート状材料2の厚さを算出する。
(もっと読む)
座標系整合方法
【課題】製品の設計形状を表現するための設計座標系と、当該製品又はその模型の形状の測定結果を表現するための測定座標系との整合精度の向上を図りうる方法を提供する。
【解決手段】設計座標系における設計にしたがって目標形状を有するように基体が作成される。また、当該基体に対して固定されている模型が作成される。第k種測定平面要素(k=1〜3)のそれぞれを表現する測定点群の座標値に基づき、最小二乗法にしたがって、設計座標系における第k種測定平面要素の姿勢が決定される。当該姿勢に応じた方向に当該測定点群を並進させた結果として、設計座標系における第k姿勢基準点群の座標値が決定される。さらに、第k姿勢基準点群に基づき、最小二乗法にしたがって決定された第k姿勢基準平面に基づいて回転演算子及び並進演算子が決定される。
(もっと読む)
位置決め装置
【課題】バックラッシに起因する位置決め精度の低下を抑えることのできる位置決め装置を提供する。
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
(もっと読む)
機械角度測定装置
【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
座標測定用ヘッドユニット及び座標測定機
【課題】小型、安価で、高速の高精度測定が可能であり、工作機械における機上測定や搬送ラインでのインサイト測定が容易な、座標測定用ヘッドユニットを提供する。
【解決手段】座標測定用ヘッドユニット10において、コンピュータ数値制御によりプローブ12を互いに直交する複数の駆動軸に沿って移動させ、測定対象に当接させて測定対象の寸法を計測するための駆動手段(X軸駆動部14、Y軸駆動部16、Z軸駆動部18)と、該駆動手段14、16、18を収めるための一体化された筐体13と、該筐体13のいずれかの側面に設けられた、前記駆動手段14、16、18のいずれか一つを支持体(ベース30に固定されたスタンド32上のサポート34)に取付けるための取付手段(取付面20)と、を備える。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
工作機械における工作物測定方法およびその装置
【課題】計測器を別途使用しなくても、工作物測定用の測定ヘッドが本来有している測定機能を有効利用して測定ヘッドの3次元オフセットを取得して、測定ヘッドで工作物を測定する工作物測定方法を提供する。
【解決手段】工作機械に取付けられた測定ヘッド10を所定角度旋回させて基準球30を第1の方向E1と第2の方向E2から測定することによって、基準球における中心点A1の座標を取得する。測定ヘッドが基準球の中心点を第1の方向から測定したときの測定ヘッドの第1の機械座標と、測定ヘッドが基準球の中心点を第2の方向から測定したときの測定ヘッドの第2の機械座標とに基づいて、測定ヘッドの3次元オフセットを取得する。その後、測定ヘッドの3次元オフセットを使用して、工作物を測定ヘッドで測定する。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。  (もっと読む)
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 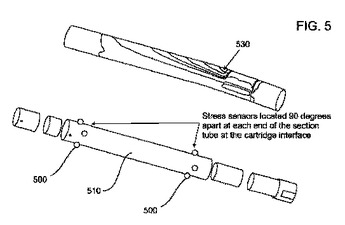 (もっと読む)
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
配管肉厚測定装置
【課題】配管表面に生じる歪みのうち熱による歪み分を除去して配管の肉厚を正確に測定できる配管肉厚測定装置を提供する。
【解決手段】圧力検出器17で配管の内圧を検出し、歪み検出装置15で配管表面の周方向の歪み及び軸方向の歪みを検出し、温度検出器11で配管の温度を検出し、ヤング率算出手段13は温度検出器11で検出した配管温度に基づいて配管材のヤング率を求め、内圧分歪み算出手段16は歪み検出装置15で検出した配管表面の周方向の歪み及び軸方向の歪みから熱による歪み分を除去し、配管の内圧による配管表面の周方向の歪み及び軸方向の歪みを算出し、肉厚算出手段14は圧力検出器17で検出した配管の内圧、内圧分歪み算出手段16で算出した配管の内圧による配管表面の周方向の歪みまたは軸方向の歪み、及びヤング率算出手段13で求めた配管材のヤング率に基づいて配管の肉厚を求める。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
輪郭形状測定装置
【課題】 生産現場においても、短時間で自動的にころの輪郭形状を精度良く測定し、形状評価が行える輪郭形状測定装置を提供する。
【解決手段】 被測定物支持手段1により支持されたころWに対し、センサ移動機構4によりセンサ3を軸方向および垂直方向に移動させ、センサ3の先端の測定子2をころWに接触させる。測定動作制御手段はセンサ移動機構4に一連の測定動作を行わせ、測定値記憶手段はころWの軸方向複数箇所のセンサ3の測定値を記憶する。判定手段は、測定値記憶手段に記憶されたころWの測定結果と、前記寸法データとを比較する。
(もっと読む)
1 - 20 / 78
[ Back to top ]