
Fターム[2F069FF07]の内容
測定手段を特定しない測長装置 (16,435) | 較正;調整 (143) | 較正に用いる標準 (86)
Fターム[2F069FF07]に分類される特許
1 - 20 / 86
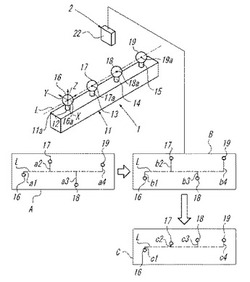
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
有関節座標計測機再配置方法、および有関節座標計測機用レトロリフレクタアセンブリ

【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現することを目的とする。
【解決手段】対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有す座標計測装置(CMM)を提供すること。
【解決手段】関節式アームCMMは、複数の伝達部材20と、少なくとも2つの伝達部材を互いに接続する複数の関節部材35と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
3次元測定方法
【課題】 被測定物の形状を高精度で測定する3次元測定方法を提供する。
【解決手段】 ウエーハ上のアライメントマーク29の高さに合わせて、カメラ8のフォーカス高さをZ2軸ステージ9により調整する。このフォーカス高さに合わせて校正用アライメントマーク10の高さをZ3軸ステージ11により調整する。この状態で、校正用アライメントマーク10の中心位置を、カメラ8とプローブ1にて測定し、この2つのカメラ8とプローブ9の距離オフセット(Xo,Yo)を高精度に求める。このオフセットを用いて、カメラ8で測定したウエーハ上のアライメントマーク29の座標を、プローブ1の座標系に高精度に変換する。プローブ9でウエーハ上のレンズを測定すれば、ウエーハ上のアライメントマーク29位置を基準で高精度にレンズ中心を求めることができる。
(もっと読む)
画像プローブの校正方法とタッチプローブ
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
座標測定装置ならびに座標測定装置を用いて加工物の幾何形状を測定する方法
【課題】座標測定装置ならびに座標測定装置を用いて測定する方法
【解決手段】本発明は座標測定装置(10)を用いて加工物の幾何形状を測定する方法およびこの装置自体に関する。本発明によれば、測定作業は異なる種類の装置を必要とすることなく最適に実行され、これにより関連作業に対して最適利用である1つまたは複数のセンサを使用できる。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
部品の外径測定装置及び外径測定方法
【課題】外径測定を簡便な演算及び装置により測定することが可能な部品の外径測定装置及び外径測定方法を提供する。
【解決手段】第1の方向に延在する本体部1aと、第1の方向と直交する第2の方向に延在する端部1b、1cを本体部1aの両端にそれぞれ有するアームと1、端部1b、1cの端面にそれぞれ設けられ、部品の表面に接触するための球または円筒形状を有する位置決め治具2と、本体部1aに配置され位置決め治具に表面が接触した部品までの距離を測定するためのゲージ3とを備える。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。  (もっと読む)
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。  (もっと読む)
(もっと読む)
複合表面粗さ標準片
【課題】複数の種類の校正およびチェクが容易にできる粗さ標準片を提供する。
【解決手段】複数の測定領域14、16を、1つのブランク12の表面に連続して、もしくは相互に間隔を置いて作る。測定領域14、16の溝パターンは、深さ方向には同一の振幅を有する正弦波状であり、測定方向の波長がそれぞれ2.5mm、0.8mm、0.25mm、0.08mm、0.025mmである溝パターンの内の2乃至5種類の測定領域14、16を有しているようにする。測定方向の波長が測定方向の距離に対して直線的に変化するようにしたり、対数関数の関係を有して変化するようにしてもよい。あるいは、複数の測定領域14、16は、それぞれが正弦波状、三角波状、及び円弧を連ねた溝パターンを有し、これらが実質的に平坦な領域を挟んで配置されているようにしてもよい。
(もっと読む)
基準器、及び座標測定機
【課題】定盤の自由な位置に設置することができ、座標測定機の製造コストを低減させることができる基準器の提供。
【解決手段】基準器は、三次元測定機に測定される基準器本体と、基準器本体を支持する台座4とを備える。台座4は、定盤11の平面11Aに当接する当接面421を有する円盤状に形成されている。当接面421には、断面円環状の凹部422が形成されるとともに、凹部422には、空気を吸気するための吸気孔423が形成されている。また、台座4は、吸気孔423に連通する吸気用流路43を有し、吸気用流路43を介して吸気孔423から空気が吸気されることで定盤11に対して吸着することができる。
(もっと読む)
レンズ中心厚測定器およびレンズ中心厚測定方法
【課題】形状や厚みが異なる種々の被検レンズのレンズ中心厚を、被検レンズの外観品質を低下させることなく正確に測定することが容易なレンズ中心厚測定器を提供すること。
【解決手段】測距用のセンサヘッド22a,22bを有する2台の非接触型測長計2a,2bと、これら2台の非接触型測長計それぞれのセンサヘッドを互いに対向させ、各センサヘッドの測定軸MA1,MA2を互いに一致させて支持する測長計支持部3Aと、センサヘッド間に設けられ、被検レンズL1の少なくとも光学中心Lc,Ldを露出させて且つ該被検レンズの光軸Lxを測定軸に一致させて該被検レンズを保持するレンズ保持部4Aとを用いてレンズ中心厚測定器1Aを構成する。
(もっと読む)
1 - 20 / 86
[ Back to top ]