
Fターム[2F069GG13]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 直接測定 (274) | 測定点の位置 (62) | 3点、4点 (36)
Fターム[2F069GG13]に分類される特許
1 - 20 / 36
鋼線長さの評価方法、鋼線の巻取方法および巻取製品
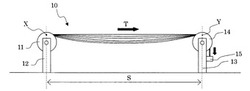
【課題】複数本にて引き揃えられた鋼線の束を構成する各鋼線の長さを、簡易にかつ正確に評価することができる鋼線長さの評価方法を提供する。また、この評価方法を用いることで、複数本の鋼線を誤差の少ないほぼ同一の長さで巻き取ることができる鋼線の巻取方法、および、これにより得られる巻取製品を提供する。
【解決手段】複数本にて引き揃えられた鋼線の束10を構成する各鋼線1の長さを評価する方法である。鋼線束10を、水平方向距離Sの間隔を有しかつ同じ高さに位置する2つの支持点X−Y間に掛け渡した状態で、鋼線束の一端を固定して他端に一定の張力を掛けたときの各鋼線のなす曲線の最低高さと支持点の高さとの差dを計測して、得られた計測値dに基づき、2つの支持点間における各鋼線の長さLを算出する。
(もっと読む)
直線度検査方法

【課題】設置場所の制限を軽減すると共に、コストの増加を抑えて、被検査物の端辺の直線度を検査可能な直線度検査方法を提供する。
【解決手段】この課題を解決するために、被検査物7の平面視における端辺8の直線度を検査する検査方法であって、前記端辺8までの距離に対応した情報を検出する距離検出部2と、被検査物7を距離検出部2に対して端辺8の一端9側から他端10側に向けて移動させる移動手段4と、距離検出部2の検出結果から端辺8の直線度を求める情報処理部1と、を備えると共に、距離検出部2が移動手段4による移動動作の移動方向Tに沿って並ぶ二つ以上のセンサ3を有し、被検査物7の移動量がセンサ3の間隔Lのセンサ3の数から1減算した値以下の整数倍になる毎に、距離検出部2が前記情報の検出動作を行うものとした。
(もっと読む)
R形状計測装置、R形状計測方法及びR形状計測プログラム
【課題】R1,000以上、特にR10,000以上の大径を有する被測定物のR形状を高精度に計測することができ、かつ、持ち運びができるようなR形状計測装置並びにR形状計測方法及びR形状計測プログラムを提供する。
【解決手段】被測定物上の少なくとも3点における座標値を測定する手段と、測定された前記座標値に基づいて、R形状の中心値(a,b)及び半径Rを、A=−2a、B=−2b、C=a2+b2−R2と置換した場合に、該A、B及びCのそれぞれを変数として、円の一般式の残差平方和を示す式を偏微分してなる連立方程式から取得するR形状算出手段と、を含む。
(もっと読む)
計測治具および配管の断面形状計測方法
【課題】配管周りのスペースが狭くても、安価な構成で、配管の軸方向に直交する断面の外径を好適に計測することができる計測治具および配管の断面形状計測方法を提供する。
【解決手段】エルボ1の軸方向に直交する断面の外径を計測する計測治具5であって、エルボ1に取付可能に構成され、エルボ1の外径よりも大径となる円形の計測枠11と、計測枠11に形成され、ダイヤルゲージ30を挿入可能に、計測枠11の径方向に貫通形成した計測穴12と、を備え、計測枠11は、真円との誤差が予め計測され、計測穴12は、計測枠11の周方向に複数設けられている。
(もっと読む)
校正装置及び真直形状測定装置
【課題】3点法プローブのゼロ点校正を3点法の環境に対するロバスト性を維持しながら、迅速に、精度よく、かつ簡便に実現できる校正装置及び真直形状測定装置を提供する。
【解決手段】校正対象となる3つの変位センサSS1〜SS3を円板CP1〜CP3に対して相対的に固定し、回転角θ=0度において3つの円板CP1〜CP3の円周を、各変位センサセンサSS1〜SS3を用いて測定して第1の測定値を求め、且つ回転角θ=180度において3つの円板CP1〜CP3の円周を、変位センサセンサSS1〜SS3を用いて測定して第2の測定値を求め、第1の測定値と第2の測定値とに基づいて、前記変位センサを校正できる
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 測定対象物の表面プロファイルを、容易に算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並ぶ3個の変位計と、測定対象物との一方(稼動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。測定対象線に沿う表面プロファイル、可動物に固定された基準点の軌跡である倣い曲線のプロファイル、及び可動物の移動に伴うピッチング成分のプロファイルうち、2つのプロイファイルで規定される解の候補を複数個決定する。表面プロファイル、倣い曲線のプロファル、及びピッチング成分のプロファイルうち、解の候補に規定されていないプロファイルに基づいて定義される評価関数の値を適応度として、複数の解の候補に遺伝的アルゴリズムを適用し、最も適応度の高い解の候補を抽出する。
(もっと読む)
ガラス条の反り測定方法およびガラス条の製造方法
【課題】母材ガラス板を加熱延伸しながらガラス条の反りを測定できるガラス条の反りの測定方法およびこれを用いたガラス条の製造方法を提供すること。
【解決手段】加熱延伸装置を用いて母材ガラス板を加熱延伸しながら、該延伸して形成したガラス条の幅方向の中心および両端部近傍を含む少なくとも3点において該ガラス条の表面および裏面の相対位置を検出し、該検出した相対位置に基づいて前記ガラス条の反りを測定する。好ましくは、前記ガラス条に向かって光を照射し、該ガラス条の表面および裏面からの前記光の反射光を測定することによって、前記相対位置を検出する。
(もっと読む)
ハブの姿勢検出方法及びその装置
【課題】車両のハブに車輪を取付ける際のハブの傾き、中心及びハブボルトの方位の検出工数を低減できる技術を提供することを課題とする。
【解決手段】距離計測部16をハブ26に臨ませる。距離計測部16を、矢印(3)のように、100mm/sの速度で移動させる。このとき、第1距離計31は破線で示すエリアPまでの距離を計測し、第2距離計32は破線で示すエリアQまでの距離を計測する。
【効果】基準位置からエリアP、Qまでの距離を計測する。ハブ面の全部ではなく、2つのエリアのみ距離計測するので、計測工数及び演算工数が低減できる。加えて、非接触のまま1回の走査で距離計測が完了するので、計測工数を低減できる。
(もっと読む)
身長測定装置
【課題】屋外で使用でき正確に測定可能な携帯型の身長測定装置を実現する。
【解決手段】携帯型の身長測定装置であって、装置から床面までの距離を測る第1の超音波センサと、被測定者の胴体までの距離を測る第2の超音波センサと、被測定者の頭部のほぼ先端までの距離を測る第3の超音波センサと、3つの測距情報を用いて被測定者の身長情報を出力する演算処理手段と、超音波センサからの信号を取り込むタイミングを規定するタイミング手段を具える。被測定者は、装置を手に持ち、測定中に鉛直方向に移動させ、第3の超音波センサが被測定者の頭部のほぼ先端を検出した時点において各超音波センサからの出力信号を取り込み、演算処理手段は取り込まれた3つの測距情報に基づいて被測定者の身長情報を得る。頭部のほぼ先端から頭頂までの距離の平均値が性別等に応じて装置に入力されており、この平均値が加算されてより正確な身長を測定できる。
(もっと読む)
長軸部を有する物体の長軸部の先端座標と該物体の位置姿勢を定義する手段との3次元相対関係測定方法およびシステム
【課題】 3次元形状測定精度が通常の環境下でも、手術器具のように長軸部を有する物体の先端部と位置姿勢検出用の標識部との3次元相対関係を精度良く較正できる。
【解決手段】 被測定物体10の長軸部の先端部と第1標識部12との3次元相対関係測定方法であって、較正用物体20を被測定物体の長軸部の先端部に取付けるステップと、3次元形状測定装置により被測定物体および較正用物体の立体形状データ群を測定するステップと、立体形状データ群から第1標識部の位置および姿勢と第2標識部21,22,23の位置および立体形状とを算出するステップと、第2標識部の位置および立体形状と当接部と第2標識部との3次元相対関係とに基づいて当接部24の3次元座標を算出するステップと、第1標識部の位置および姿勢と当接部の3次元座標とに基づいて被測定物体の長軸部の先端部と第1標識部との3次元相対関係を算出するステップと、を有する。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
XYステージ
【課題】バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージを実現する。
【解決手段】プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離づつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備える。
(もっと読む)
近接露光装置及び基板の製造方法
【課題】1軸方向にのみ移動可能なワークステージを備える簡素な機構の近接露光装置において、ワークステージに搭載された基板の平坦度を2次元で精度よく測定することができる近接露光装置を提供する。
【解決手段】基板Wを保持して一軸方向(例えば、X方向)に移動可能なワークステージ1と、マスクステージ2上に配置されてセンサ駆動機構47によりワークステージ1の移動方向と直交する方向(例えば、Y方向)に移動されるギャップセンサ40とを備え、ワークステージ1及びギャップセンサ40を互いに直交する方向に移動させて基板Wの平坦度を2次元で測定する。
(もっと読む)
相対高さ検出装置
【課題】突出した2点あるいは3点間の相対高さを、簡単な構成により、高い精度で検出可能な相対高さ検出装置を提案すること。
【解決手段】相対高さ検出装置1は傾斜表示板2を備えており、基準面5aに載せた測定対象の球体a、bの上に点接触状態で傾斜表示板2を載せる。傾斜表示板2には角度センサ3が組み込まれており、球体a、bの高低差に対応した傾斜姿勢となっている傾斜表示板2の傾斜角度が角度センサ3によって測定される。演算装置4では、傾斜角度θxと、球体a、b間の既知の距離L1に基づき、球体a、bの高さの違いを検出する。球体a、bの微小な高低差が傾斜表示板2の比較的大きな傾斜角度として現れるので、この傾斜角度に基づき、球体a、b間の高低差を高い分解能で検出できる。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
流体動圧軸受の検査方法及びこの流体動圧軸受を備えたスピンドルモータ
【課題】 流体動圧軸受を高精度に検査すること。
【解決手段】 気体を給送して、スリーブ6の軸受孔の下側開口からラジアル間隙50及び軸受孔の上側開口を経てロータハブ12の上壁部12aの外方に向かう気体の流れを起こして、ロータ部10を浮上させる。ロータ部10を浮上させた状態で、変位計40を用いてロータ部10の回転と同期した振れの大きさを測定する。
(もっと読む)
1 - 20 / 36
[ Back to top ]