
Fターム[2F069GG18]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 間接測定 (218) | 荷重 (30)
Fターム[2F069GG18]に分類される特許
1 - 20 / 30
位置計測装置及び位置計測システム
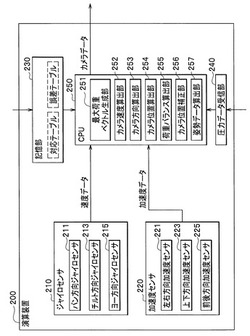
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システム

【課題】足底圧の計測において荷重が検出されない欠損部分がある場合でも足底の重心バランスの偏りを常に精度よく判定できる足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システムを提供する。
【解決手段】足底圧の圧力分布を計測する足底圧計測センサ20、足を撮像するテレビカメラ30、処理装置40を備え、足底圧データ取得部41により足底圧データを取得し、足画像取得部42により足画像を取得し、足外形寸法演算部44により足の外形位置を検出して足の外形寸法を演算し、足底重心位置演算部43により、検出された足の外形位置を基準とした足底重心位置を演算し、重心バランス判定部45により足底重心位置と足外形寸法とに基づいて重心バランスの偏りを判定する。また、足の症状判定部46により足の症状を判定し、選定部47により重心バランスの偏りと足の症状に基づいて靴またはインソールを選定する。
(もっと読む)
電極厚さ変化測定装置
【課題】充放電時における正極および負極それぞれの厚さ変化を個別に測定することができる電極厚さ変化測定装置の提供
【解決手段】本発明に係る電極厚さ変化測定装置100は、充放電時における正極または負極の厚さ変化を測定する装置であり、第一硬質平板1と、第一電極2と、測定電極台座3と、第二電極4と、第二硬質平板(電極押さえ)5とを順に積層した積層体を電解質と接触する状態で密閉した電極厚さ変化測定用セル10と、第一電極に荷重を付加する荷重負荷手段11と、第一リード12および第二リード13を介して、電極厚さ変化測定用セル10内の第一電極(図示しない)および第二電極(図示しない)に電気的に接続され、充放電を行う充放電装置14と、第一電極の充放電時の変位を測定する変位計15とを備え、測定電極台座3と第二硬質平板5との間隔は、第二電極4が膨張しても変化しない構成となっている。
(もっと読む)
チューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置
【課題】短時間のうちに非破壊でチューブの内径を測定できるチューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置を提供する。
【解決手段】チューブの測定方法は、チューブ50の長手方向の長さLを測定すること、第1の物質aを充填した状態でのチューブ50の第1の重量を測定すること、第2の物質wを充填した状態でのチューブ50の第2の重量Mwaterを測定すること、第1の重量Mairと第2の重量Mwaterとの差分からチューブ50の内容積Vを算出すること、内容積Vと長さLとにより、チューブ50の平均断面積Sを算出すること、及び、平均断面積Sより、チューブ50の内径IDを算出すること、を含む。
(もっと読む)
熱間長尺材の長さ測定方法および装置
【課題】熱間圧延後の長尺材がその長さ方向に搬送されつつある時に、その長さを精度良く、しかも安価に、測定することができる、熱間長尺材の長さ測定方法および装置を提供する。
【解決手段】後端センサとしてのロードセル10から搬送ライン下流側に順次所定のセンサ配置間隔で複数のアナログHMD121、122‥‥12nを配置し、最上流側のアナログHMD121を用いて先端検出用の閾値を決定し、該決定した閾値を下流側のアナログHMD122‥‥12nに設定してこれらを先端センサとして用いる。長尺材(鋼管)1の長さは、後端センサ(ロードセル)での後端検出時刻と、その直前に先端検出した先端センサ(アナログHMD)での先端検出時刻と、センサ配置間隔とから算出される。
(もっと読む)
路面状態測定方法、路面状態測定装置、およびコンピュータプログラム
【課題】段差や凹凸という路面状態を高い精度をもって測定できるようにすること。
【解決手段】荷重センサ111に所定重量の錘113で荷重をかけた状態のセンシング装置112を搭載した車両を走行させ、所定のサンプリング間隔毎に荷重センサ111の出力を記録し、これに対応させてその記録位置の位置情報を記録する。錘113の重力による荷重のみがかけられた状態の荷重センサ111の出力を静止荷重と観念し、車両走行中の荷重センサ111の出力を衝撃荷重と観念し、静止荷重に対する衝撃荷重の値の変化を求め、これを位置情報に関連付けて表示するようにした。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
合金鋼の表面上に形成された窒化物層を検出しかつ除去する方法
【課題】その上に磁性表面層が形成された非磁性合金製の構成要素を処理する方法を提供する。
【解決手段】本方法は、(a)較正マグネットゲージの磁石を構成要素の表面と接触させるステップと、(b)磁石を構成要素の表面から引離しかつ該磁石を引離すのに必要な力を測定するステップと、(c)その力を磁性表面層の厚さと相関させるステップと、(d)表面層の厚さが所定の最小厚さよりも大きい場合には、該表面層を除去するステップとを含む。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
湿潤膜厚測定方法および装置
【課題】 塗工装置上において乾燥環境等による外乱を受けずに塗工膜の湿潤膜厚を測定する。
【解決手段】
基材の張力を測定する張力測定過程と、基材の厚さを測定する厚さ測定過程と、塗工後の基材を所定幅で切断し測定用サンプルを得る切断過程と、測定用サンプルを巻き取る巻取過程と、測定用サンプルの全長を測定する全長測定過程と、巻取体における測定用サンプルの基材部分と塗工部分から成る全質量を測定する全質量測定過程と、張力と測定厚さから基材の真の厚さを演算する真厚さ演算過程と、巻取体における測定用サンプルの湿潤膜厚を(湿潤膜厚)=((全質量)−(基材密度)×(真厚さ)×(所定幅)×(全長))/((塗工液密度)×(所定幅)×(全長))から演算する湿潤膜厚演算過程とを有するように湿潤膜厚測定方法およびその方法を適用した装置。
(もっと読む)
湿潤膜厚制御方法および装置
【課題】塗工装置上において乾燥環境等による外乱を受けずに塗工膜の湿潤膜厚を測定し、その湿潤膜厚が適正範囲となるように制御する湿潤膜厚制御方法と装置を提供する。
【解決手段】
基材の張力測定過程と、基材の厚さ測定過程と、全面塗工済の所定幅の測定用サンプルを得る切断過程と、測定用サンプルの巻取過程と、測定用サンプルの全長測定過程と、測定用サンプルの全質量測定過程と、張力と測定厚さから基材の真の厚さを演算する真厚さ演算過程と、巻取体における測定用サンプルの湿潤膜厚を演算する湿潤膜厚演算過程と、演算した湿潤膜厚が適合膜厚の範囲内であるか範囲外であるかを判定する膜厚適合判定過程と、判定が範囲外であるときには塗工部の塗工条件を操作する操作過程とを有するようにした湿潤膜厚制御方法およびその方法を適用した装置。
(もっと読む)
スポット溶接装置を用いた金属板隙間計測方法およびその装置
【課題】 スポット溶接する複数の金属板の隙間を計測する。
【解決手段】 本発明は、アームの先端に支持された第1の電極と、該第1の電極と協働して重なり合う複数の金属板を加圧状態で挟持して溶接する第2の電極とを有するスポット溶接装置を用いる。挟持方向の加圧力と該加圧力によってたわむアームの挟持方向のたわみ量との関係を求める。アームに挟持方向の荷重を検出する荷重検出器を取り付けた状態で、該アームの先端と第2の電極との間に、隙間の計測箇所を配置し、第2の電極により金属板を加圧する。第2の電極による第1の加圧力と荷重検出器により検出される第2の加圧力とを比較する。第2の加圧力が第1の加圧力より小さいとき、第2の加圧力と加圧力とたわみ量との関係とに基づいてアームの挟持方向のたわみ量を算出する。算出したたわみ量と、複数の金属板の厚さ合計と、加圧中の第2の電極の挟持方向位置とに基づいて計測箇所の隙間を算出する。
(もっと読む)
小動物の位置測定システム
【課題】1Kg程度の飼育ケース内に存在する10〜30g程度と軽量な小動物の位置情報を、安価に収集するシステムを提供する
【解決手段】重心の変化を求める荷重計とは別に、重量を支える支柱2を用意することにより、広いダイナミックレンジの荷重計を用いる必要が無くなり、システムを低コストで提供することが可能となる。安価なシステムを提供できれば、これまで容易に評価できなかった開発機関でも導入がすすみ、より多くの研究者が積極的に研究できる体制を整備することが可能となる。また、医薬品や機能性食品等の研究開発における学術レベルの向上に貢献できる。
(もっと読む)
シャフトの過負荷を回避する方法
本発明は、例えば混練器のシャフトであるシャフトの曲げを監視することによって過負荷を回避する方法に関しており、ここでこのシャフトは少なくとも片側が支承されている。第1のステップでは、支承部とは異なる少なくとも1つのシャフト位置において、半径方向所定位置からのシャフトの偏差を測定する。別の1ステップでは、場合によっては上記の測定した半径方向所定位置からの偏差から比較量を求める。第3のステップでは、第1のステップで測定した半径方向所定位置からの偏差または第2のステップで形成した比較量と、あらかじめ定めた境界値とを比較する。 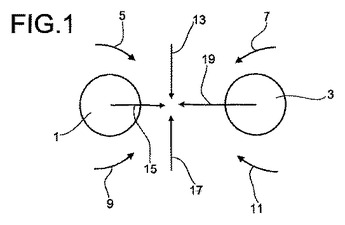 (もっと読む)
(もっと読む)
シート状物湾曲測定装置およびシート状物湾曲測定方法
【課題】シート状物の蛇行の有無に関わらず、テンションが付与された状態のシート状物の湾曲を精度良く測定する。
【解決手段】シート電極湾曲測定装置100に、シート電極11のシート面に当接するテンション検出用ローラ110と、テンション検出用ローラ110の一端および他端への作用力をそれぞれ検出するテンション検出装置121・122と、シート電極11の蛇行量を検出する蛇行量検出装置151・152と、蛇行量検出装置151・152により検出されるシート電極11の蛇行量に基づいてテンション検出装置121・122により検出されるテンション検出用ローラ110の一端および他端への作用力の検出値を補正し、当該補正されたテンション検出用ローラ110の一端および他端への作用力の検出値の差分に基づいてシート電極11の湾曲の有無を判定する湾曲判定装置160と、を具備した。
(もっと読む)
ベッド・オブ・ネイル式形状測定におけるピンの高さ調節
システム、方法、装置及び製品は、ガラス基体等といった測定対象についてのベッド・オブ・ネイル式の形状測定ゲージにおけるピンの高さ調節の系統的な計算及び実行に関し、特に、液晶ディスプレイ(LCD)用板ガラスの製造に用いられるガラス基体等の物体の表面の無重力形状を測定するためのベッド・オブ・ネイル式ゲージの使用に関する。1つ以上の実施形態は、測定中に表面を支持するよう動作可能な複数のピンを備え得る。各ピンは、測定信号を送るよう動作可能なロードセルと、調節信号を受け取り、該調節信号を受け取ったらピンの高さ調節を実行するよう動作可能な高さ調節器とを備える。ピンの高さ調節の実行により、表面が各ピンに及ぼす測定された力が、無重力形状に対応する目標とする力に近づくよう、ピンが系統的に配置される。 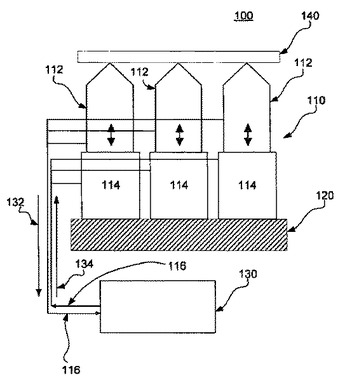 (もっと読む)
(もっと読む)
変形可能な幾何学的形態のプロセスと取得デバイス
【課題】変形可能材料によって規定された幾何学的形態の取得プロセスを提供する。
【解決手段】変形可能な幾何学的形態のプロセスおよび取得デバイス。センサ(1)のセットがこの形態(曲面または表面)上に置かれる。その状況で、それぞれのセンサがこのセンサの位置でのその形態の方向を表現する信号を供給し;その形態のモデルが選択され;その信号に基づいて、モデルのパラメータが決定され、センサを隔てる距離が測定され;そしてモデルと距離測定とのパラメータに基づいて、その形態の点の空間的配置が決定される。本発明は特に、機械加工、建具、石積み加工、および構造加工の分野に適用される。
(もっと読む)
鉄道車両の車輪とレールとの接触位置検知方法
【課題】車輪とレールとの接触位置を連続的に測定する。
【解決手段】板部1bの中央部に設けた輪重測定用孔1dの、同一円周上の内周対向位置に1組の輪重測定用歪みゲージ2a…を、板部1bのボス側の表裏に横圧測定用歪みゲージ3a…、3a’…をそれぞれ貼り付けたPQ車輪1の、横圧測定用歪みゲージ3a…、3a’…から半径方向外方に延長した線上の、板部1bのリム側のRしまい部近傍に接触位置検知用歪みゲージ4a…、4a’…をさらに貼り付ける。横圧測定用歪みゲージ3a…、3a’…、接触位置検知用歪みゲージ4a…、4a’…とそれぞれのブリッジ回路から計測された歪みと、輪重測定用歪みゲージ2a…とブリッジ回路から得られた輪重とから、車輪とレールとの接触位置を検知する。
【効果】走行中の車輪とレールとの接触位置を、高い検知精度で連続的に測定でき、脱線に対する安全性をより厳密に評価できる。
(もっと読む)
位置推定装置、位置推定方法及び位置推定プログラム
【課題】比較的低性能なセンサを用いる場合でも、複数の対象物の位置を安定して推定することができる位置推定装置を提供する。
【解決手段】 位置センサ1は、複数の人物の位置を検出し、IDセンサ2は、各人物が装着した光IDタグ3のID番号を検出し、位置尤度算出部42は、検出された位置を用いて人物の位置の尤度を算出し、ID尤度算出部43は、検出されたID番号を用いて光IDタグ3のID番号の尤度を算出し、位置推定部44は、算出された人物の位置の尤度及びID番号の尤度を基に各人物の位置を推定する。
(もっと読む)
1 - 20 / 30
[ Back to top ]