
Fターム[2F069GG41]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 速度、角速度、加速度を積分するもの (124)
Fターム[2F069GG41]に分類される特許
1 - 20 / 124
姿勢検出装置および姿勢検出方法
電子機器
位置計測装置及び位置計測システム
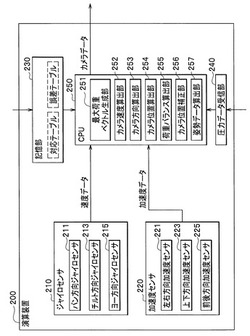
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
状態検出装置、電子機器及びプログラム

【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
長尺材の変位量測定装置
【課題】長尺材のうねり(変位量)を簡易かつ正確に測定することができる長尺材の変位量測定装置を提供する。
【解決手段】変位量測定装置は、定速走行部1と、架台2と、加速度計3と、記録計4とを備える。定速走行部1は、上下方向に伸びる長尺材(ガイドレールR)に沿って定速で走行する。架台2は、この定速走行部1と共に長尺材に沿って移動される。加速度計3は、架台2の平面方向の加速度を計測する加速度計であって、長尺材のうねりに応じて傾いた架台2の平面方向に生じる重力の加速度成分を計測する。記録計4は、加速度計3の計測結果を記録する。この計測結果と定速走行部1の走行速度とを利用することで、長尺体の変位量を演算により求めることができる。
(もっと読む)
路面凹凸評価システム
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
接触面形状測定装置
【課題】柔軟な物体同士の接触面の形状をより正確に測定できる測定装置を提供することを目的とする。
【解決手段】本発明にかかる接触面形状測定装置100は、柔軟な物体102、104同士の接触面106の形状を測定する測定装置において、接触面に沿って配置される柔軟性を有する基板108と、基板に貼付され貼付位置での基板の歪量を測定する2つ以上の歪センサ110と、歪量に基づいて曲率を算出し、該曲率に基づいて、2つ以上の歪センサが貼付された経路に沿った接触面の形状を近似した曲線を算出する形状近似部120と、基板上の経路に配置され配置位置での基板の傾斜角を測定する少なくとも2つの加速度センサ112と、いずれかの加速度センサの配置位置における近似した曲線の接線角と測定した傾斜角との差分を算出する比較部122と、差分が所定の値以内に収まるように、近似した曲線を補正する補正部124とを備えることを特徴とする。
(もっと読む)
計測装置、及び計測方法
【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
センサベースのオリエンテーションシステム
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
レール凹凸測定装置
【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
座標測定機
【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
長尺体の直線度の経時変化を把握する方法、システム
【課題】長尺体の直線度の経時変化を把握する方法およびシステムを提供すること。
【解決手段】長尺体の直線度の経時変化を把握する方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S3)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S4)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S5)と、定期的に前記移動体を移動させ、その都度前記情報処理部が前記情報処理し、該情報処理した結果の経時変化を、記憶部が記憶する記憶工程(S6)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度を測定する測定方法、携帯型測定用キット
【課題】長尺体の直線度を容易に測定することを考慮した方法を提供すること。
【解決手段】長尺体の直線度を測定する測定方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S2)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S3)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S4)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度測定装置、長尺体の直線度測定方法
【課題】長尺体の直線度を容易に測定することを考慮した直線度測定装置を提供すること。
【解決手段】長尺体13の直線度測定装置1は、第1直線ガイド部材2と、第2直線ガイド部材3と、移動体4と、角速度センサー(5)と、情報処理部10と、測定対象の長尺体13と前記第2直線ガイド部材3とが一つの直線軸を形成するように、前記測定対象の長尺体13を取り付け可能な取り付け部11と、を備え、前記移動体4が、前記第1直線ガイド部材2と前記長尺体13とにガイドされて一の方向へ移動し、前記移動体4が移動している間の前記角速度センサー(5)の姿勢の変化の情報と前記長尺体13における移動中の前記角速度センサー(5)の位置との関係を、前記情報処理部10が関連づけして情報処理することにより前記長尺体13の直線度を測定する構成であることを特徴とする。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
鉄道車両アタック角測定装置および方法
【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
球体移動経路の測定方法
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
転がり軸受の振動値予測方法及び転がり軸受の製造方法
【課題】転がり軸受の組み付けに先だって、転がり軸受の振動値を予測することができる、或いは振動値を制御することができる転がり軸受の振動値予測方法及び転がり軸受の製造方法を提供する。
【解決手段】外輪軌道面11a及び内輪軌道面12aにおけるうねりの中でnZ(n:正の整数)山、(nZ+1)山、及び(nZ−1)山成分の外輪振幅総和値及び内輪振幅総和値と、転動体13の転動面13aにおけるうねりの中で2m(m:正の整数)山成分の転動体振幅総和値と、から統合振幅総和値を求めると共に、統合振幅総和値が既知の転がり軸受10を回転させたときの振動値を測定して、統合振幅総和値と振動値との相間関係を求め、この相間関係に基づいて使用する転がり軸受10に対して計算された統合振幅総和値から振動値を、或いは、振動値から使用する転がり軸受10に許容される統合振幅総和値を予測する。
(もっと読む)
1 - 20 / 124
[ Back to top ]