
Fターム[2F069GG56]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 他の物理量と組み合わせるもの (49)
Fターム[2F069GG56]に分類される特許
1 - 20 / 49
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
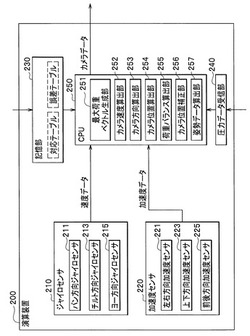
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
重心決定

【課題】三次元物体の重心を決定する方法を提供する。
【解決手段】第一の方向付けで検査プラットフォームに物体を位置付けるステップ615、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定するステップ620、第一の軸及び第二の軸に直交する第三の軸に対して物体を回転させるステップ625、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ630、及び物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿った重心の位置を決定するステップ635を含む。
(もっと読む)
膜厚測定方法および膜厚測定装置、半導体集積回路の製造方法、制御プログラム、可読記憶媒体
【課題】電子部品の電極の導電性積層膜の膜厚を安価な装置で高速に測定する。
【解決手段】絶縁膜1上に上下に積層された導電層2,3(積層膜、例えばNi層およびその上のAu層)からなる半導体基板の電極に対して、段差を触針で測る場合やレーザ光を用いる場合など公知の方法で導電層2,3の厚さ(電極高さ)を測定するステップと、4端針法により電極の表面抵抗を測定するステップとを有し、二つのステップから得られた積層膜の膜厚(電極高さ)と表面抵抗値から、上下に積層した導電層2,3からなる電極の上部皮膜である導電層3の膜厚を計算式から算出する。
(もっと読む)
路面凹凸評価システム
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
金属試料を測定する膨張計
【課題】温度に依存する長さの変化を正確に測定することができる膨張計を提供する。
【解決手段】試料3を固定することのできる試料ホルダ4、14と、試料3を加熱するために試料3に配置される少なくとも1つの誘導コイル5と、試料3の温度を測定する少なくとも1つのセンサとを備える、金属試料3を測定する膨張計1であって、試料3の長さの変化を検出する光学測定装置6、9が備えられている。これにより、温度に依存する、試料の長さの変化を正確に測定することができる。
(もっと読む)
自動二輪車の緩衝器ストローク検出装置
【課題】簡素でコンパクトな構造で緩衝器のストローク量を精度良く検出させる。
【解決手段】伸縮自在に嵌合したインナーチューブ6及びアウターチューブ5と、これらチューブの内部に配設された油圧緩衝用の作動油11と、伸縮によって容積を変化させる空気室2とを備えた自動二輪車の緩衝器1において、空気室2内に配設されて空気室内の空気圧を検出する圧力検出手段3と、圧力検出手段の検出値から緩衝器のストローク量を換算するストローク量演算手段20とを少なくとも備えたストローク検出装置34を採用する。緩衝器1の所定のストローク位置を検出して補正用の実ストローク量S2を計測するストローク位置検出手段14,15を備える。空気室2内に配設されて空気室内の空気温度を検出する温度検出手段4を備え、圧力検出手段3と温度検出手段4との検出値から緩衝器1のストローク量S1を換算する。
(もっと読む)
平坦度測定装置及び平坦度測定方法
【課題】コンベアベルトの振動の影響を補正できる平坦度測定装置及び平坦度測定方法を提供する。
【解決手段】コンベアベルト34と、前記コンベアベルト34を回転することにより駆動するロールと、前記コンベアベルト34の振動を検出するための第1のセンサ38と、シート32の先端の高さ位置を測定するための第2のセンサ40と、前記第1のセンサ38からの信号と、前記第2のセンサ40からの信号と、を受信して解析するための制御部と、を備え、前記制御部は、前記コンベアベルト34の接続部が前記ロール上に無いと判断したときは、前記第2のセンサ40からの信号に基づいて前記シートの平坦度を算出する際、前記第1のセンサ38からの信号に基づいて前記コンベアベルト34の振動による影響を補正した平坦度を算出し、前記コンベアベルト34の接続部が前記ロール上にあると判断したときは、前記シート32の平坦度を算出しない平坦度測定装置。
(もっと読む)
鉄道車両の車輪角度測定方法及び車輪角度測定装置
【課題】簡素な構成によってレールに対する車輪の相対角度を検出可能でありかつ汎用性が高い鉄道車両の車輪角度測定方法等を提供する。
【解決手段】車軸20の両端部に固定された一対の車輪10を有し、車輪とレールRi,Roとの接触部に作用する荷重に応じた出力を間欠的に発生する荷重検出手段Bpを備えた荷重測定用輪軸1を用いた鉄道車両の車輪角度測定方法を、荷重測定用輪軸が装着された車両を走行させながら荷重測定用輪軸の回転角度位置を逐次検出し、荷重検出手段の出力がピークを示す回転角度位置の変化に基づいて車輪のレールとの接触点の車輪周方向移動量を求め、接触点の車輪周方向移動量に基づいて車輪のレールに対する相対角度を求める構成とする。
(もっと読む)
管路内耐火物の残厚推定方法
【課題】高温ガスの管路内部に配設されている耐火物の残厚測定を容易に且つ精度よく実施することで耐火物の更新・交換時期の最適化により該耐火物のコストを低減させるとともに耐火物の脱落・劣化判定のための作業者の負荷を低減させることが可能な高温ガス管路内耐火物の残厚推定方法を提供するものである。
【解決手段】管路表面と管路内部の耐火物の位置に、それぞれ管路のガス流れ方向に温度を測定する光ファイバーを設け、光ファイバーにより測定した管路表面の温度、光ファイバーにより測定した内部の耐火物の位置での温度、測定した管路内ガス温度、既知の鉄皮表面の光ファイバーと内部の耐火物内の光ファイバーとの間の距離、既知の放熱量から耐火物の残厚を演算する管路内耐火物の残厚推定方法。
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 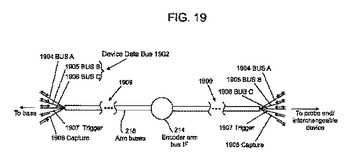 (もっと読む)
(もっと読む)
軌道検測のための検出器ユニット
【課題】
光学的変位センサを搭載する検出器ユニットを堅牢な構造にしなくても台車に取付けることが可能で一般の営業車両にも取付けることができるように小型軽量化した軌道検測のための検出器ユニットを提供することにある。
【解決手段】
この発明は、レールの横断方向、すなわち、台車の横梁方向に沿って設けた収納ケースに内装する内装フレームを水平板フレームとこれから起立する垂直板フレームで構成し、光学的変位センサは垂直板フレームの両端にそれぞれ設ける。内装フレームの両端を緩衝部材を介して収納ケースに取付け、質量が大きいジャイロを水平板フレームの中央部付近に搭載する。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 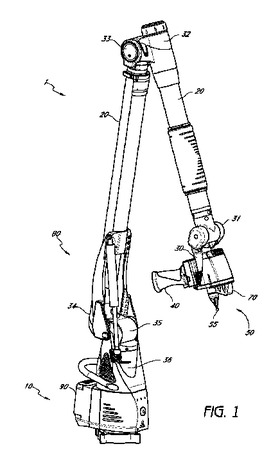 (もっと読む)
(もっと読む)
掘削土留工における3次元計測システム
【課題】 掘削土留工の挙動を面的に評価できる土留壁の変位計測手法を用いることにより、構造物全体の挙動を把握するとともに、変位の原因を捉え易くする掘削土留工における3次元計測システムを提供することを目的とする。
【解決手段】
掘削土留工における3次元計測システムにおいて、土留壁10の面に配置される複数の高感度センサー11〜16と、この複数の高感度センサー11〜16の間を補完するように配置される複数の低感度センサー21〜80と、前記高感度センサー11〜16及び前記低感度センサー21〜80からの計測データを処理するデータ処理装置Aと、このデータ処理装置Aに接続される表示装置Bとを備え、前記土留壁10の面全体の変位データを計測し、前記土留壁10の面的な挙動を把握する。
(もっと読む)
軌道鉛直変位計および軌道鉛直変位計測方法
【課題】
軌条の挙動特に鉛直方向変位の計測は安全管理面から極めて重要であるにもかかわらず直接的に計測することは振動、衝撃等の影響から一般的には行なわれていないのが現状である。
【解決手段】
(1)電解液傾斜受感素子を内蔵し、取付面部とスペース部材を有した軌道鉛直変位計を提供する。
(2)前記軌道鉛直変位計を軌条の一定区間毎に複数設け、これら出力を鉛直方向変位量に変換するようにした軌道鉛直変位計測方法を提供する。
(もっと読む)
金属帯板の形状測定ロール
【課題】調整が容易で部品の交換だけで長期間使用することができ、金属帯板の幅方向の端部まで精度良く形状を測定することができる金属帯板の形状測定ロールを提供する。
【解決手段】金属帯板が走行するラインに両端が回転自在に支持され前記金属帯板を巻き付けるように設置する金属帯板の形状測定ロール1において、表面に少なくとも1本以上の軸方向溝を形成した内側ロール10と、内側ロール10に嵌合する中空円筒20と、内側ロール10の軸方向溝40内に設置され金属帯板の巻付け圧力を測定する複数のセンサセット30とを備えた。
(もっと読む)
路面バンク角推定装置
【課題】車輪に路面から作用する力を検出するための力センサを必要とすることなく、安価な構成で、路面のバンク角を安定に推定する。
【解決手段】車輪と路面との間の摩擦特性モデルを含む車両モデルを用い、水平面上での車両横力モデル推定値Fgy_total_estmを求めると共に、これを車両質量mで除算してなる横加速度モデル推定値Accy_estmを求める手段と、横加速度モデル推定値Accy_estmと横加速度センサ15の出力が示す横加速度検出値Accy_sensとの偏差を求める手段と、該偏差から路面のバンク角の暫定推定値を求め、該暫定推定値をハイカット特性のフィルタに通すことにより路面のバンク角推定値θbank_estmを求める手段とを備える。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
長尺円筒部材の真直度計測治具とその計測方法
【課題】長さが2mを超える長尺円筒部材に計測用の罫書を施すことなく、長尺円筒部材の真直度を高精度に計測することができる長尺円筒部材の真直度計測治具とその計測方法を提供する。
【解決手段】真直度計測治具10は、治具本体12と水準器18からなる。治具本体12の下面12aは求心構造13を有し、求心構造により治具本体を長尺円筒部材1の外径上部又は内径下部に水平を保持して載せると、長尺円筒部材の中心軸Z−Zから同一高さ及び同一向きの「求心位置」を維持する。さらに、治具本体12は、オートレベル又はトランシットでピッチングを計測可能な上下方向の高さ変位計測目盛20Aと、トランシットでヨーイングを計測可能な幅方向の幅変位計測目盛20Bとを備える。
(もっと読む)
駐車支援装置
【課題】車輪速センサのパルスから算出した車輪の移動距離の誤差を補正し、自車両の位置を精度良く検出することができる駐車支援装置を提供する。
【解決手段】車輪速センサ2から計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する車輪移動距離算出手段1と、車輪移動距離から自車両の位置を演算する自車位置演算手段4と、自車両の位置に基づき各距離センサ1によって得られた距離データの分布を各距離センサ1に対し生成する距離データ分布生成手段5と、各距離センサ1の距離データ分布を照合し、車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段6と、車輪の移動距離の誤差に基づき車輪移動距離算出手段3にて用いられる変換係数を補正する変換係数補正手段7を備えている。
(もっと読む)
真直度測定装置
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
1 - 20 / 49
[ Back to top ]