
Fターム[2F069GG58]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279)
Fターム[2F069GG58]の下位に属するFターム
異種の検出器を用いるもの (175)
Fターム[2F069GG58]に分類される特許
1 - 20 / 104
電子機器
物品の形状検査装置
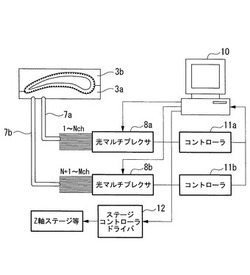
【課題】検査体において設計形状との誤差が公差から外れている箇所を検査体上で容易に特定できる物品の形状検査装置を提供することを目的とする。
【解決手段】XY平面に設置されたベースと、ベース上に設置された検査体の寸法を計測するセンサユニット3a,3bと、検査体において、センサユニット3a,3bによって計測された検査体の形状実測値と予め設定されている設計値との誤差が公差を外れている箇所を特定する処理装置10と、処理装置10によって誤差が公差を外れていると判定された箇所にマーキングを行う印字ノズルとを具備する物品の形状検査装置を提供する。
(もっと読む)
標識検定装置

【課題】標識検出器と組み合わせて用いられる標識の、検出原理上の回転対称性の程度を評価するための標識検定装置を、提供する。
【解決手段】標識検定装置は、装着部により検定対象の標識を回転軸部材に装着して、駆動部によって回転軸部材に所定の周期運動を与えた場合に、標識検出器から得られた標識の検出データを、処理部に入力し、処理部のデータ処理によって標識の検出原理上の軸対称性の指標データを検定データとして得る。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を演算する演算部において、検出結果をより確実に用いることができるように出力することができる技術を提供する。
【解決手段】回転体に取り付けられたギアにより回転力が付与されて回転する第1の従動ギアおよび第2の従動ギアそれぞれの回転角度を検出する第1の回転角度センサおよび第2の回転角度センサと、第1の回転角度センサおよび第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算するECUとを備え、第1の回転角度センサおよび第2の回転角度センサの少なくともいずれかは、検出した回転角度に応じたデューティ比を有するパルス幅変調信号を、立ち上がりエッジおよび立ち下がりエッジのいずれか一方のエッジが予め定められた周期となるように出力するとともに、検出した回転角度に応じた時間に予め定められた時間TPを加算した時間を一方のエッジから他方のエッジまでの時間とする。
(もっと読む)
無軌道式移動台車の位置検出装置及び方法
【課題】無軌道式移動台車が球面,円筒面,平面を移動する場合の位置検出装置において、無軌道式移動台車が例えば球面や円筒面を周方向に移動して位置検出装置から隠れてしまう場合であっても、位置検出が可能な位置検出装置を与えることを目的とする。
【解決手段】本体内部にワイヤを備え、前記ワイヤが牽引された量をエンコーダ値として出力する第二リニアエンコーダが取り付けられた第二保持治具を設置し、前記第二のリニアエンコーダのワイヤ先端を前記無軌道式移動台車の前記リニアエンコーダのワイヤ先端の取り付けられた位置に取り付け、前記第一のリニアエンコーダのワイヤが牽引された量と前記第二のリニアエンコーダのワイヤが牽引された量とから前記無軌道式移動台車の位置を前記演算装置にて演算すること特徴とする。
(もっと読む)
走査運動誤差測定方法
【課題】特別な外部基準を必要としないため簡便、低コスト、迅速、低設置面積といった特徴を持つ走査運動誤差測定方法において、従来、取り除くことのできなかったスピンドル回転誤差の影響を低減できる走査運動誤差測定方法を提供する。
【解決手段】旋盤や円筒研削盤上において作製した加工対象である被加工物5をスピンドル3から取り外すことなくそのまま測定の基準として用いて、被加工物5を搭載したスピンドル3の回転中心軸4に対して工具Tと正対する位置に変位検出器Bを配置し、回転中心軸4に沿ってスライドにより走査しながら得られた変位検出器Bの出力から、回転中心軸4を基準としたスライド走査機構の持つ運動誤差を測定する装置において、回転中心軸4の整数回転分の平均を求めることにより、回転中心軸4の運動誤差の影響を低減する。
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
位置検出装置、位置検出方法及びプログラム
【課題】プライバシー問題に影響されることなく計算コストを抑制しながら空間内における人の位置と向きを検出可能な位置検出装置を提供する。
【解決手段】 位置検出装置10は、空間に設置され、空間内に位置する人との距離を非接触で測定する複数の距離センサ11〜14と、複数の距離センサ11〜14から所定の時間間隔で取得される距離情報に基づき、空間内における人の位置および向きを所定の演算により検出する演算制御装置16とを含む。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
3次元形状測定システムおよび強度評価システム
【課題】被測定対象物の周囲に障害物がある場合においても正確に3次元形状を測定することのできる3次元形状測定システムおよび測定された3次元形状によって容易に強度を評価することのできる評価強度評価システムを得ることにある。
【解決手段】被測定対象物の3次元表面形状を測定する表面形状測定装置1と、被測定対象物の3次元内面形状を測定する内面形状測定装置2と、被測定対象物の構造材内部の状態を測定する非破壊測定装置3と、この表面形状測定装置、内面形状測定装置、非破壊測定装置によって計測された3次元点群データを入力合成する点群データ変換入力合成装置4と、この点群データ変換入力合成装置によって合成処理した点群データから3次元形状を作成する3次元形状変換処理装置5を有することを特徴とする。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
工作機械の状態検知装置および方法
【課題】被加工物と工具取付け軸の位置を常に正しく検知しながら正しい寸法の加工物が得られる工作機械の状態検知装置および方法を提供する。
【解決手段】数値制御自動工作機械1において工具取付け軸6はX軸方向の正逆両方向へ駆動され、工具保持部材7はZ軸方向の正逆両方向へ駆動され、移動テーブル13はY軸方向の正逆両方向へ駆動される。工具取付け軸6先端の工具8は移動テーブル13上に固定して載置される被加工物に対して相対的にXYZの3次元方向へ移動しながら被加工物を所定に形状に加工する。工具取付け軸6の下部に配設された波動発信器9から所定の波動エネルギーが常時発信され、据付テーブル3の一方(図の左方)の端部の2個の波動受信機12a、12b、長短4本の波動受信機設置アーム14a、14b、15a、15bに設けられた4個の波動受信機12c、12d、12e、12fにより常時工具取付け軸6の位置と被加工物との位置関係を検出しながら工具8により被加工物が加工される。
(もっと読む)
真直度測定装置
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
ロール角推定装置、及び電動パワーステアリング装置
【課題】一般乗用車に装備されやすいセンサを利用し、車体のロール角φを高精度に推定する。
【解決手段】例えばマルチ荷重センサ12により、左右輪に作用する垂直荷重WL及びWR、並びに横力FL及びFRを検出する。そして、左右輪に作用する垂直荷重WL及びWRに応じて、左右輪の荷重移動量ΔWを算出し、この荷重移動量ΔW、並びに横力FL及びFRに応じて、車体のロール角φを推定する。より正確に車体のロール角φを推定したければ、横力における、車輪進行方向に対する直角方向成分、つまりコーナリングフォースFcFL〜FcRRを用いる。
(もっと読む)
形状測定装置
【課題】複数台の測定機間での振動の影響を排除した上で高い操作性と測定精度を実現した新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物50を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の制御装置41,42と、を備えるものであって、前記制御装置41,42は、測定機CMM1,CMM2の動作状態を検出自在であるとともに、制御装置41,42ごとで連携を取り合うことにより、一の測定機CMM1の動作状態の検出結果に応じて他の測定機CMM2に対する動作指令を発信自在である。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
ダム堤体の変位計測装置
【課題】ダム堤体の変位を正確に、かつ、低コストに測定することができるダム堤体の変位計測装置を提供する。
【解決手段】ダム堤体の変位計測装置の傾斜計21の測定傾斜角と傾斜計21の周囲の測定温度は記憶部25に記憶される。制御部27は、測定温度から傾斜計21によって測定された傾斜角を補正し、補正された傾斜角から傾斜計21周辺のダム堤体の変位量を産出する。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】計測点間隔が大きくても変位量を求めることができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ5に支持されたレール3の長さ方向に間隔をおいて設置されている計測傾斜角を計測する複数個の傾斜計6と、レール3の計測点間部分における補間傾斜角を推定する演算装置とを有し、演算装置は、レール3上の点の長さ方向の位置を表す位置値を示す位置軸と、レール3の傾斜角を表す傾斜角値を示す傾斜角軸とからなる位置−傾斜角座標において、計測点の位置値と計測傾斜角の傾斜角値とで表される座標計測点を含み、位置値に対応した傾斜角値を与える予備補間関数を求め、計測点間の位置値と補間傾斜角の傾斜計値とで表される、予備補間関数上の暫定点を補正することによって、暫定点に代わる仮想座標計測点を求め、座標計測点及び仮想座標計測点を含み、位置値に対応した傾斜角値を与える本補間関数を求める。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
1 - 20 / 104
[ Back to top ]