
Fターム[2F069GG65]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 数個 (79)
Fターム[2F069GG65]に分類される特許
1 - 20 / 79
回転部品の動作を監視する際に使用するためのシステムおよび方法
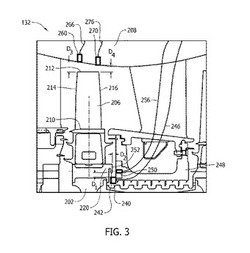
【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法

【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
複数の設備の相対位置を監視するデバイス
【課題】共通基準システム(4)上に振動隔離機構(2、3、5)を介して搭載され、該共通基準システムに対して変動する位置をとる、リソグラフィ・デバイス(1)及びワークステーション・デバイス(6)を含む装置において、両デバイス間の相対位置の変動を監視して該装置が誤動作しないように調整する。
【解決手段】前記共通基準システムに対する前記リソグラフィ・デバイス及び前記ワークステーション・デバイスの個々の位置を測定する手段と、測定された両デバイスの個々の位置から算出される両デバイス間の相対位置(d、7b)が所定の公差範囲内(7a−7c)にあるかどうかを評価する手段を含む装置。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する関節式アームを提供する。
【解決手段】関節式アームCMM10は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
座標測定装置ならびに座標測定装置を用いて加工物の幾何形状を測定する方法
【課題】座標測定装置ならびに座標測定装置を用いて測定する方法
【解決手段】本発明は座標測定装置(10)を用いて加工物の幾何形状を測定する方法およびこの装置自体に関する。本発明によれば、測定作業は異なる種類の装置を必要とすることなく最適に実行され、これにより関連作業に対して最適利用である1つまたは複数のセンサを使用できる。
(もっと読む)
平衡度測定装置及び平衡度測定方法
【課題】工具の平衡度を、該工具の先端の形状や温度等に依存せず、短時間で精度良く測定することができる平衡度測定装置及び平衡度測定方法を提供する。
【解決手段】工具Tが離間可能に当接される測定面11を設けた測定部10と、測定部10の測定面11に対向した付勢面11bに当接し、測定部10を付勢する付勢部21と、測定部10の付勢面11bに当接した状態で設けられ、工具Tに当接された測定部10が付勢されている方向と反対の方向に移動した場合に、測定部10の位置を検出する検出部31と、測定部10の測定面11の側に設けられ、付勢部21に付勢された測定部10を離間可能に係留して停止させる係留部40と、検出部31と電気的に接続され、検出部31が検出した測定部10の位置の変化量又は位置の絶対値を報知する報知部とを有する。
(もっと読む)
形状推定システム、センタサーバ、形状推定方法、および形状推定プログラム
【課題】精度よく検出対象物に関する情報を推定する形状推定システム、センタサーバ、形状推定方法、及び、形状推定プログラムを提供する。
【解決手段】複数のセンサ端末201−1〜201−mのそれぞれは、センシングエリア内にある検出対象物を検出するとともに、当該検出対象物との距離に応じた強度を検出する検出部101と、前記検出部による検出結果をセンタサーバ401に送信する通信部102とを有し、前記センタサーバは、前記複数のセンサ端末から送信される前記検出結果を受信する通信部301と、前記複数のセンサ端末から送信される前記検出結果と記憶部303から読み出したセンシングエリア情報を用いて前記強度に応じて区分される複数のクラス毎に推定方程式を求め、当該複数の推定方程式に基づき連立方程式を解くことにより、前記検出対象物を表わす検出対象物情報を算出するデータ処理部302とを有する。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
偏心測定装置
【課題】モータを運転した際に、モータから振動や騒音、うなりを生じる場合、モータを取り外して、偏心の有無や、偏心の状態を確認する必要があった。
【解決手段】モータを取り外すことなく、固定子フレームに3個またはそれ以上の個数の加速度センサを取り付け、センサから得られる周波数成分を解析することで、モータの偏心の有無や、偏心の状態を測定することを特徴とする。本発明により、モータの偏心の測定が容易にできることとなる。
(もっと読む)
移動体位置推定検出システム及び移動体位置推定検出方法
【課題】高精度に移動体の位置等を推定、検出することができるシステム等を提供する。
【解決手段】異なる場所にそれぞれ設置されて、移動体により生じる物理量の信号を検出する複数の磁気検出器1と、各磁気検出器1の検出した信号に対応したパラメータの値を最小自乗法により算出し、パラメータの値に基づいて、各磁気検出器1の検出に係る移動体の位置をそれぞれ算出する位置算出器4A及び4Bと、位置算出器4A及び4Bが算出した位置に基づいて、移動体の位置を推定検出する位置推定検出器10とを備える。
(もっと読む)
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
一体化したターニング・センタを有する非接触検査システム
【課題】ロータの機械加工と非接触検査システムを一体化する。
【解決手段】非接触検査システム110は、制動表面を指す非接触センサ(112−1、112−2)の1つ以上の対及びディスクの外径を指す非接触センサを有する。非接触センサは、誘導性センサ、容量性プローブ及び/又はレーザ・センサである。システムは、制動表面102、104厚さ変動、横振れ、平坦さ、平行性及び直径等の種々の特徴及び特性を測定する。ディスクが指定速度で回転する間に又はディスクが停止している間に測定を行う。非接触センサ(112−1、112−2)の対は、センサ又は校正された表面から、その指した表面までの距離を連続的に測定する。他の2つのセンサ(115及び/又は117)は、センサ又は校正された表面から、その指した面までの距離を連続的に測定する。
(もっと読む)
形状推定システム、サーバ装置、形状推定方法、及び、形状推定プログラム
【課題】位置が特定されていないセンサノードで検出された検出対象に関する情報から、検出対象の形状情報を推定する形状推定システムを提供する。
【解決手段】形状推定システムが、複数のセンサノードとサーバ装置とを備える。複数のセンサノードのそれぞれは、予め定められている複数のセンシングエリア内における検出対象物の有無を検出するセンサ部と、センサ部による検出結果をサーバ装置へ送信する第1の通信部とを有し、複数のセンサノードが、複数のセンシングエリアの設定条件が異なる複数種類のセンサノードからなり、サーバ装置は、複数のセンサノードから送信された検出結果を受信する第2の通信部と、複数のセンサノードから受信した検出結果と、複数のセンサノードの複数のセンシングエリアに関する情報と、複数のセンシングエリアの平均密度に関する情報とに基づいて、検出対象物の形状に関する形状情報の推定値を算出する処理部とを備えている。
(もっと読む)
コークス炉の移動機の位置検出装置及び位置検出方法
【課題】コークス炉の移動機の現在位置を正確且つ安価に検出できる位置検出装置及び位置検出方法を提供する。
【解決手段】位置検出装置は、レール31〜35に接し移動機21〜25の移動に伴って回転するローラ42の絶対的な回転角度を測定するアブソリュート回転角度検出装置41を備え、移動機21〜25の現在位置を示す位置情報を出力する位置情報出力手段と、位置情報出力手段により出力された移動機21〜25の位置情報の誤差を修正する誤差修正手段と、を備える。誤差修正手段は、コークス炉10に設置された基準標識51と、移動機21〜25に搭載され基準標識51を検出する非接触式センサ52と、非接触式センサ52により基準標識51を検出した場合には、その時点において位置情報出力手段から出力された移動機21〜25の位置情報を、基準標識51に予め付与された基準位置情報に置換する位置情報置換手段と、を備える。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
1 - 20 / 79
[ Back to top ]