
Fターム[2F069HH01]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | タッチプローブ (162)
Fターム[2F069HH01]に分類される特許
1 - 20 / 162
トンネル切羽の整形システムおよび整形方法
真円度測定装置
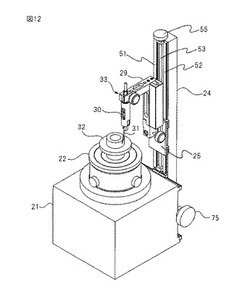
【課題】測定位置および方向を変える場合でも、検出器の取り付けを変更せずに検出器ホルダの取り付け方向のみを変更すればよく、測定点が測定平面からずれない真円度測定装置の実現。
【解決手段】ベース21と、載置されたワーク32を回転する回転台22と、回転台の回転軸に対して平行に伸び、回転台の回転軸とワークの測定点を含む測定平面に平行に移動可能なコラム24と、コラムに沿って移動可能に支持されたキャリッジ25と、キャリッジに取り付けられた検出器ホルダ29と、測定子31が測定平面で変位可能なように、検出器ホルダに取り付けられた検出器30と、を有し、検出器ホルダは、測定平面に垂直な回転軸を中心とした異なる回転位置でキャリッジに取り付け可能で、異なる回転位置に取り付けても測定子が測定平面で変位可能な状態が維持される真円度測定装置。
(もっと読む)
形状評価方法、形状評価装置、プログラム及び記録媒体

【課題】輪帯面と壁面とが交互に連続して形成された被測定面であっても、フィッティング精度を向上させることを目的とする。
【解決手段】複数の点データを列毎にグループ化して複数の点列データを生成する(S102)。点列データ毎に走査軌跡面関数をそれぞれ求める(S103)。複数の点データの中から各輪帯面のデータと見做せる点データを各輪帯面に対応して抽出し、得られた抽出データ毎に、その抽出データを関数近似して輪帯面を示す輪帯面関数をそれぞれ求める(S104)。設計データに基づいて壁面関数をそれぞれ求める(S105)。各面関数が交差する各々の交点データを求める(S106)。参照データと交点データとをフィッティングさせる座標変換パラメータを求める(S107)。座標変換パラメータで各点データを座標変換する(S108)。座標変換した点データと被測定面の設計データとの差分を求める(S110)。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
3次元寸法測定方法
【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有す座標計測装置(CMM)を提供すること。
【解決手段】関節式アームCMMは、複数の伝達部材20と、少なくとも2つの伝達部材を互いに接続する複数の関節部材35と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
座標測定機
【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
形状測定方法、これを用いた加工方法、および形状測定装置
【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する関節式アームを提供する。
【解決手段】関節式アームCMM10は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
画像プローブの校正方法とタッチプローブ
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
表面形状測定装置及び表面形状測定方法
【課題】複数の測定面領域が互いにオーバーラップ領域を持たない場合などでも、複数の面測定データの相対位置関係を高精度に合わせることができる表面形状測定装置及び表面形状測定方法を提供する。
【解決手段】表面形状測定装置10は、光学的表面形状測定機11と触針式検出器22などの高さ測定機を備え、光学式表面形状測定機11で測定した複数箇所の測定面領域の各面測定データにおける高さ測定点の各測定値の相対的位置関係を、高さ測定機22で測定した前記高さ測定点の各測定値の相対的位置関係に合わせるように前記各面測定データを移動補正する。
(もっと読む)
測定装置
【課題】被測定物を比較的高い精度で簡易に測定でき、製造コストの低減も期し得る測定装置を提供する。
【解決手段】被測定物7を載置するテーブル9が、その中心Aを通る軸線回りに回転できる。テーブル9の前方側に、左右方向で移動する測定器17を有する。測定器17は、前後方向で進退する測定子19を具え、後退状態にある測定子19の先端の接触点20とテーブルの中心Aを通る左右方向の直線との間の距離が所要値に設定されている。測定器17は、左右方向で見た一端側位置22と他端側位置25で、被測定物7の前面12に向けて進行し、後退状態の接触点と被測定物の前面12との間の第1距離D1、第2距離D2を測定する。第1距離D1と第2距離D2が相違する場合は、一端側位置22と他端側位置25における、接触点20と前面12との間の距離が等しくなるようにテーブル9が回転する。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
1 - 20 / 162
[ Back to top ]