
Fターム[2F069HH15]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | エンコーダー (296) | ロータリー (154)
Fターム[2F069HH15]に分類される特許
1 - 20 / 154
トンネル切羽の整形システムおよび整形方法
位置計測装置及び位置計測システム
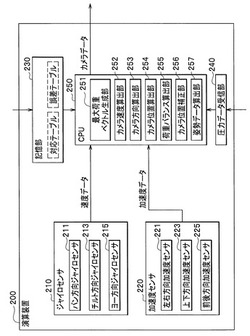
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
有関節座標計測機再配置方法

【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
有関節座標計測機再配置方法、および有関節座標計測機用レトロリフレクタアセンブリ
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現することを目的とする。
【解決手段】対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。
(もっと読む)
シート長計測装置及び画像形成装置
【課題】用紙が搬送される際のバタツキを抑えた状態で用紙の通過を検出することで、シート長の計測精度を高める。
【解決手段】搬送されるシートPの搬送量を計測する搬送量計測手段15と、前記シートの搬送をガイドするガイド部材31a,31b,32a,32bと、前記シートの搬送方向における下流側で、前記ガイド部材に沿って搬送される前記シートの先端部通過を検知する先端検知手段11と、前記シートの搬送方向における上流側で、前記ガイド部材に沿って搬送される前記シートの後端部通過を検知する後端検知手段12と、を有し、前記先端検知手段、前記後端検知手段及び前記搬送量計測手段の出力に基づいて、前記シートの搬送方向の長さを算出するシート長計測装置100であって、前記先端検知手段及び前記後端検知手段が前記シートの端部通過を検知する領域において、前記シートを前記ガイド部材に密着させるエア吐出手段又はエア吸引手段を備える。
(もっと読む)
3次元寸法測定方法
【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
多関節型座標測定装置
【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
測定方法、測定装置及びプログラム
【課題】被測定面の形状測定に有利な技術を提供する。
【解決手段】円形外形の被測定面の形状を測定する測定方法であって、被測定面を保持するステージをステージ回転軸を中心として回転させ被測定面の複数の部分領域のそれぞれを測定装置の視野に位置決めし(S304)、部分領域のそれぞれを測定して形状データを取得する取得ステップ(S306)と、部分領域のそれぞれの形状データから被測定面の形状を算出する算出ステップとを有し、輪郭部分領域のそれぞれについて被測定面の中心の位置を求める第1ステップと、被測定面の複数の中心の位置から回転する被測定面の回転の中心である回転軸の位置を求める第2ステップと、第2ステップで求めた回転軸の位置及び複数の部分領域のそれぞれを位置決めする際のステージの回転角度を用いて、複数の部分領域のそれぞれの形状データをつなぎ合わせて被測定面の形状を求める第3ステップ(S314)とを有する。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有す座標計測装置(CMM)を提供すること。
【解決手段】関節式アームCMMは、複数の伝達部材20と、少なくとも2つの伝達部材を互いに接続する複数の関節部材35と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する関節式アームを提供する。
【解決手段】関節式アームCMM10は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
チューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置
【課題】短時間のうちに非破壊でチューブの内径を測定できるチューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置を提供する。
【解決手段】チューブの測定方法は、チューブ50の長手方向の長さLを測定すること、第1の物質aを充填した状態でのチューブ50の第1の重量を測定すること、第2の物質wを充填した状態でのチューブ50の第2の重量Mwaterを測定すること、第1の重量Mairと第2の重量Mwaterとの差分からチューブ50の内容積Vを算出すること、内容積Vと長さLとにより、チューブ50の平均断面積Sを算出すること、及び、平均断面積Sより、チューブ50の内径IDを算出すること、を含む。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
位置決め装置
【課題】バックラッシに起因する位置決め精度の低下を抑えることのできる位置決め装置を提供する。
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
鉄道車両の車輪角度測定方法及び車輪角度測定装置
【課題】簡素な構成によってレールに対する車輪の相対角度を検出可能でありかつ汎用性が高い鉄道車両の車輪角度測定方法等を提供する。
【解決手段】車軸20の両端部に固定された一対の車輪10を有し、車輪とレールRi,Roとの接触部に作用する荷重に応じた出力を間欠的に発生する荷重検出手段Bpを備えた荷重測定用輪軸1を用いた鉄道車両の車輪角度測定方法を、荷重測定用輪軸が装着された車両を走行させながら荷重測定用輪軸の回転角度位置を逐次検出し、荷重検出手段の出力がピークを示す回転角度位置の変化に基づいて車輪のレールとの接触点の車輪周方向移動量を求め、接触点の車輪周方向移動量に基づいて車輪のレールに対する相対角度を求める構成とする。
(もっと読む)
1 - 20 / 154
[ Back to top ]