
Fターム[2F069MM31]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 駆動装置 (203)
Fターム[2F069MM31]の下位に属するFターム
プローブの (96)
スピンドルの (7)
載置台の (56)
ジョイスティックにより操作するもの (5)
駆動速度に制限のあるもの (1)
粗微動装置 (23)
Fターム[2F069MM31]に分類される特許
1 - 15 / 15
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
移動機構の防塵装置および測定機

【課題】可動部材への影響を極力低減できる防塵装置およびこれを用いた測定機を提供する。
【解決手段】ステージ2を挟む第1蛇腹部材31および第2蛇腹部材32と、蛇腹部材31,32の伸縮方向に対して直交する幅方向両端側にステージ2の移動方向に沿って配置され蛇腹部材31,32のステージ側端部をガイドするガイド機構50と、ステージ2の移動に同期して第1蛇腹部材31および第2蛇腹部材32が伸縮するように、ステージ2と第1蛇腹部材31の連結部材33および第2蛇腹部材32の連結部材34との間に掛け回されたワイヤ60とを備える。ワイヤ60は、ステージ2の略重心を通りかつステージ2の移動方向に沿った軸線上に配置されている。
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
可動情報を伝送するための位置測定装置及び方法
【課題】数値制御機械等において、制御部へ正確なデータを伝送する位置測定装置を提供する。
【解決手段】位置測定装置は、位置測定ユニット10、速度測定ユニット20、算術ユニット30、及びインターフェースユニット40を持つ。位置測定ユニット10で2つの測定値(P;Pn;Pn−1)が測定され、速度測定ユニット20で物体の移動値vが算出される。算術ユニット30は測定値(P;Pn;Pn−1)及び移動値vが供給されて、シーケンス電子部100における実際の測定値(P;Pn;Pn−1)の測定間の時間間隔を特定し、移動値vの訂正値Kを算出する。そのために、訂正値Kのデータワード幅が、移動値vのデータワード幅より実質的に小さい。
(もっと読む)
測長装置
【課題】筐体(22)内に配置された基準尺(20)と基準尺(20)から間隔を開けたスキャナカートリッジ(10)から成る測長装置に関する。
【解決手段】スキャナカートリッジ(10)は、基準尺(20)の互いに垂直な方向を向いた二つの案内面(201,202)上を移送されるとともに、磁気力によって、これらの面(201,202)に押し付けられる。スキャナカートリッジ(10)内には、永久磁石(161,162)が配置されるとともに、筐体(22)の溝(231,232)内には、スチールベルト(261,262)が嵌め込まれており、基準尺(20)の面(201,202)に対してスキャナカートリッジ(10)を押す磁気力が、永久磁石(161,162)とスチールベルト(261,262)との相互作用によって生じる。
(もっと読む)
シリンダボアの測定方法及び測定装置
【課題】エンジンのシリンダボアの真円度等を測定する際、シリンダヘッドとベアリングキャップ部材とをシリンダブロックに締結し、実際のエンジンの作動状態に近似させた状態で測定を行って、エンジンの作動状態における正確な真円度の測定データを得る。
【解決手段】測定するエンジンのシリンダブロック1に、シリンダヘッド3とベアリングキャップ部材とをボルトにより組み付けてシリンダ組立体9とする。これをベアリングキャップ部材8が上側となるように設置し、ウォータージャケットに高温の流体を送り込む。この状態で測定装置20を組立体9の上方からシリンダボア2に挿入して測定することにより、エンジンの作動時の状態を再現し、内部応力や熱膨張の影響を反映した真円度を測定することができる。測定装置20を設置するため、主軸受部には載置ブロック21が掛け渡され、位置決めのため、シリンダボア2と合致する基準部材22が設けられる。
(もっと読む)
走査型プローブ顕微鏡用走査機構および走査型プローブ顕微鏡
【課題】高品質なAFM像を取得できる走査型プローブ顕微鏡用走査機構を提供する。
【解決手段】走査機構は、可動部124とXY弾性部材とZ弾性部材127Aと127Bと固定部125とからなるXYステージと、可動部124をX方向に移動させるXアクチュエーター122Aと、可動部124をY方向に移動させるYアクチュエーターと、Z方向に変位しうるZアクチュエーター123と、Zアクチュエーター123の中央部を保持している保持部材130と、Zアクチュエーター123の下側の自由端に固定された試料台131と、Zアクチュエーター123の上側の自由端に固定されたセンサーターゲット132と、センサーターゲット132の変位を検出する変位センサー114とを有している。保持部材130は可動部124に固定されている。センサーターゲット132は試料台131とほぼ同等の重さを有している。
(もっと読む)
検査装置および検査方法
【課題】 検査対象の良否を高速に検査できる検査装置および検査方法を提供する。
【解決手段】 検査対象である液晶パネル(ガラス基板)10の上部にセンサ1を固定して、その検査対象10をエアフローにより浮上させて非接触検査を行う際,測長部4によるレーザ測長によりセンサ1と液晶パネル10間の距離を計測し、その結果をもとにセンサ側からも、エアー噴出部11によるエアー噴出を行ってセンサ1と液晶パネル10間の間隔(ギャップ)を制御する。
(もっと読む)
駆動装置
【課題】 移動体の位置検出ポイントが広い間隔をあけて複数存在する場合でも、移動体を高い精度で位置決めすることができる駆動装置を提供する。
【解決手段】 磁界を発生させる磁界発生部材7と、磁界を検出する第1,第2,第3の磁界検出素子6A,6B,6Cから成る磁界検出手段6と、磁界発生部材7を移動させる圧電アクチュエータPとを備える。磁界検出手段6での検出結果に基づいて磁界発生部材7と磁界検出手段6との相対的な位置決めを行う際、磁界発生部材7が移動する可動範囲において、所定領域では第1,第2の磁界検出素子6A,6Bの検出結果に基づいて第1の位置決めを行い、所定領域から離れた所定ポイントでは第3の磁界検出素子6Cの検出結果に基づいて第2の位置決めを行う。
(もっと読む)
タンク底板の板厚測定装置
【課題】 タンク底板鋼板の板厚の測定をより効率的に行うこと。
【解決手段】 タンク底板の板厚を測定する板厚測定装置Aであって、板厚測定装置Aの筐体1には、装置Aを車輪を用いて走行させる走行機構10と、超音波探触子22及び渦流型センサ23を搭載してタンク底板の情報を取得するための測定台車20と、測定台車20から得た情報を演算処理する演算手段30と、演算手段30により得た情報を表示する表示手段50と、超音波探触子22に対して接触媒質を供給する接触媒質供給手段60と、上記各手段に電源を供給する電源供給手段70と、を一体的に有することを特徴とする。
(もっと読む)
無端ベルト用エレメント検査方法及び検査装置
【課題】 純粋なエレメントのみの変位量を測定できるようにした無端ベルト用エレメント検査方法及び検査装置を提供する。
【解決手段】 ベルト式無段変速機に用いられる金属性無端ベルトの構成部品であるエレメントの検査方法において、前記エレメントを多数個積層して構成したエレメント積層体(32)の積層方向に圧力を加えて該エレメント積層体を保持する保持工程と、前記圧力を調整して、ベルト式無段変速機に実装したときに前記エレメントの両面に加えられる実際の荷重に相当する検査荷重(Pa)を設定する設定工程と、前記検査荷重が加えられた状態の前記エレメント積層体の一端側に所定の曲げ力(Pb、Pc)を与えて該エレメント積層体の一端側の変位量を測定する測定工程とを含む。
(もっと読む)
試料傾け補助具
【課題】 本発明は、簡単に大きく傾斜角度を変更できる試料傾け補助具を提供することを目的とする。
【解決手段】 試料の計装時等において、試料を傾けるための試料傾け補助具は、台となるベースと、前記ベースに回転可能に支持された回転体と、前記ベースに移動可能に支持された可動体と、前記可動体を一軸方向に移動させる駆動体とを具備する。前記可動体が移動することにより、前記回転体の前記ベースに対する傾きは変化する。前記可動体の移動方向を前記ベースの表面に平行にした。また、少なくとも前記ベースと前記可動体と前記可動体とは磁性材料により形成されており、前記可動体に磁石を取付ける。
(もっと読む)
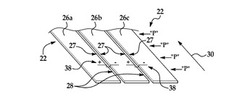
表面測定用プローブの使用法
測定用プローブが取り付けられる機械を用いて人工物を計測する方法。この方法は、以下のステップ、人工物の表面上の1つ以上の地点の近似的な位置を決定するステップと、この近似的な位置を用いてプローブおよび人工物のうちの少なくとも一方をそのプローブおよび人工物における所望の1つ以上の相対位置に移動させるステップと、該位置において人工物の表面上の地点の1つ以上の表面計測値を取得するステップであって、1つ以上の表面計測値が取得される間、そのプローブと人工物との間の相対移動がないステップと、その計測値からのデータを用いて、動誤差が実質的に低減されるその表面上の1つ以上の地点の位置を決定するステップと、を有する。 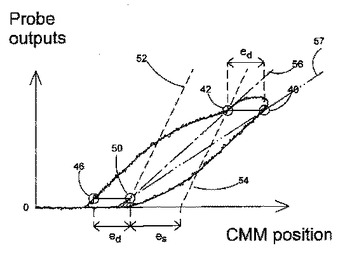 (もっと読む)
(もっと読む)
タッチセンサ
【課題】 スタイラスの軸方向に対して有害な曲げ振動の発生を防止することで、微細な表面形状の測定を可能にするタッチセンサを提供する。
【解決手段】 スタイラス1は、その軸方向に略対称の構造である。スタイラス1とスタイラスホルダ5とを連結する支持部材6〜9のスタイラス側の支持部10〜13は、スタイラスの重心3に対してスタイラスの軸方向に対称となる複数個所で、更に、その各個所においてスタイラスの軸4に対称な複数個所である。スタイラスの軸方向同一個所における各組の支持部材の重心が略前記軸上にある。加振手段31および検出手段32の少なくとも一方は、重心3から等距離となる少なくともスタイラス上の2個所に橋渡しされるように設けられている。
(もっと読む)
1 - 15 / 15
[ Back to top ]