
Fターム[2F069NN01]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 方向判別(回転又は進行方向) (14)
Fターム[2F069NN01]に分類される特許
1 - 14 / 14
位置計測装置及び位置計測システム
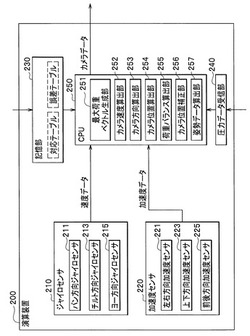
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
球体移動経路の測定方法

【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
車両用舵角推定装置及びそれを搭載した電動パワーステアリング装置
【課題】ステアリング機構で検出したSAT検出値(推定値)と、演算で求めたSAT演算値とを比較し、4輪だけでなく、2輪の回転速度のみからでもステアリング特性の変化を検知し、誤推定がなく、精度良く舵角若しくは絶対舵角を出力することができる車両用舵角推定装置を提供する。
【解決手段】車両の左右車輪の回転速度を検出する車輪回転速度センサを備える車両用舵角推定装置であり、車輪回転速度センサで検出した車輪回転速度に基づいて車輪からハンドルに作用する物理量を演算して出力する物理量演算部と、前記物理量及びSAT検出値若しくはSAT推定値に基づいて推定舵角を出力する推定舵角出力部とを設ける。
(もっと読む)
測定方法及び測定冶具
【課題】板状体の表面に変形を生じさせることなく、高精度に板状体の表面形状の測定を行う測定方法を提供すること。
【解決手段】板状体を略垂直方向に自立させ、板状体の測定面を略垂直方向に立てることを特徴とする板状体の表面形状の測定方法、及び、この測定方法を好ましく用いることができる測定冶具を提供する。
本発明によれば、板状体の表面に変形を生じさせることなく、高精度に板状体の表面形状の測定を行う測定方法を提供することが可能である。
(もっと読む)
レール継目板の締結ボルト脱落検出方法および脱落検出装置
【課題】
軌道検測車がレールのカーブに入ったときでもレール継目板の締結ボルト脱落を走行状態で検出することができるレール継目板の締結ボルト脱落検出方法および装置を提供することにある。
【解決手段】
この発明は、レール継目板の静止画を撮像するカメラの視野を、軌道検測車がレールのカーブを走行するときの軌道検測車の車体の上下変動によるレール継目板の映像の移動範囲をカバーする大きさとして静止画像を得て、軌道検測車の走行方向を検出するあるいは車体の傾きを検出する検出器からの信号、例えば、通り変位器からの信号に応じてレール継目板を含むエリア画像を切出すようにしているので、切出すエリア画像の範囲を制限しても通常の走行状態において軌道検測車がカーブに入ってもレール継目板の画像を得ることができる。
(もっと読む)
内燃機関のクランク角度検出装置
【課題】欠け歯部の誤検出を防止し、クランク角度の基準位置を正確に特定することを可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121、該信号板121の外周に所定角度離して配設され、被検出部が通過する毎に、それぞれ第1信号SGT1と第2信号SGT2を発生する第1信号発生手段122と第2信号発生手段123、第1信号と第2信号の状態から欠け歯部を検出して基準クランク位置を特定する基準クランク位置特定手段、クランク軸の回転方向を判定するクランク軸正回転判定手段を備え、被検出部の等間隔部の角度の1/2を基準被検出部間角度とし、前記所定角度を、基準被検出部間角度より大きく且つ整数倍以外に設定すると共に、クランク軸正回転判定手段が正回転と判定している時のみ基準クランク位置を特定するようにしたもの。
(もっと読む)
測定の不確実性を考慮した多次元測定データの公差域への適合
測定座標系内で集めた測定データを、測定の不確実性を考慮に入れて、幾何公差域に適合させる。測定データを適合させるための幾何学的自由度を用いて、測定データに関連した不確実領域を公差域内に適合させる。典型的には、測定データは多次元であり、不確実領域は異なったサイズを有する。 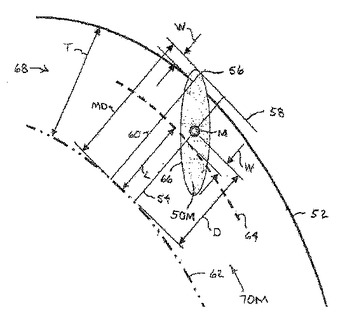 (もっと読む)
(もっと読む)
油圧作業機械における油圧シリンダのストローク位置計測装置
【課題】
新規に演算処理能力の高い大容量のメインコントローラを開発することなく、多数の油圧シリンダのストローク位置を高精度に計測出来るようにする。
【解決手段】
制御用コントローラ20とは独立して計測用コントローラ30が設けられ、この計測用コントローラ30に回転センサ100、リセットセンサ300の検出信号を入力させてストローク位置の計測処理を行わせ、計測結果を制御用コントローラ20に送るようにする。計測用コントローラ30の記憶テーブル36には、予め回転センサ100の出力電圧値と回転角度との対応関係が記憶されており、回転センサ100の検出信号が入力されると、記憶テーブル36の対応関係を参照して対応する回転角度が求められ、求められた回転角度に基づいて油圧シリンダ200のストローク位置が計測される。
(もっと読む)
連続鋳造機におけるロールのベアリング異常検出装置及び方法
【課題】 連続鋳造機におけるロールのベアリング異常を早期に且つ正確に検出する。
【解決手段】 鋳片を挟み込む一対のロール2,3が鋳片の鋳造方向に所定の間隔で並ぶ連続鋳造機において、各ロール2,3の両端部を回転可能に支持するベアリング4a,4a,5a,5bの異常を検出する装置及び方法であって、一対のロール2,3間における少なくとも2箇所の対向間隔L1,L2を測定し、測定した少なくとも2箇所の測定値の差(L1−L2)を計算すると共に、各測定位置の当該測定前に測定した測定値との差(ΔL1,ΔL2)を計算し、それぞれ計算した値が予め設定されたしきい値を超えたときに、そのしきい値を超えたロールのベアリング異常と判定する。
(もっと読む)
回転角度検出装置
【課題】製造コストを低減することができる回転角度検出装置を提供する。
【解決手段】ステアリングシャフト12と一体的に回転する主動歯車14には同一の軸を中心として回転する歯数の異なる第1及び第2の主動歯車部61,62を設けるようにした。一方、第1及び第2の従動歯車15,16の歯数をそれぞれ同じとし、それら第1及び第2の従動歯車15,16を第1及び第2の主動歯車部61,62にそれぞれ噛合させるようにした。このため例えば歯数の異なる二種類の従動歯車をそれぞれ同一の主動歯車に噛合させることで減速比を異ならせるようにした場合と異なり、単一種類の主動歯車14と単一種類の第1及び第2の従動歯車15,16を用意すればよいので、回転角度検出装置11の製造コストを低減することができる。また、第1及び第2の従動歯車15,16の主動歯車14に対する組み付け間違いもない。
(もっと読む)
形状加速度計測装置及び方法
【課題】 連続したリアルタイムの計測ができ、かつ/または、動的形状を追跡できる。
【解決手段】 少なくとも1つのフィールド測定センサと、基体内の少なくとも1つの曲率測定センサとを有したセンサアレイであって、フィールド測定センサはフィールドに対して基体の配向データを得ることができ、曲率測定センサは動的・静的形状と、地質学的、構造的、生物学的物体の振動を測定するための、構造体内の相対的配向データを得ることができる。
(もっと読む)
ステアリングセンサ及び出力センサ
【課題】 電源異常の発生を速やかに検出することができるステアリングセンサを提供すること。
【解決手段】 ステアリングセンサ2は、経時的にレベルが変化するパルス信号を生成するパルス発生器21と、スイッチ22とを備えており、パルス発生器21は、異なる周波数を有する二相のパルス信号Sm,Snを生成する。そして、スイッチ22は、Z相パルス信号SzがLoレベルである場合にはパルス信号Snを出力する。
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 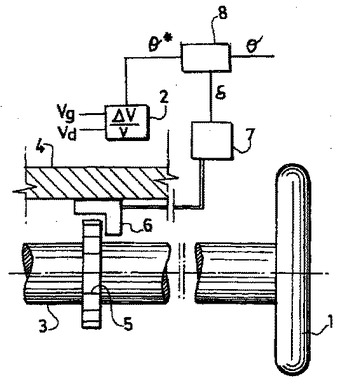 (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]