
Fターム[2F069QQ00]の内容
測定手段を特定しない測長装置 (16,435) | 表示 (337)
Fターム[2F069QQ00]の下位に属するFターム
Fターム[2F069QQ00]に分類される特許
1 - 20 / 37
電線弛度測定方法および装置
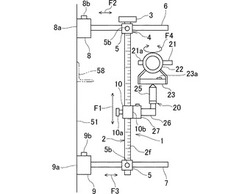
【課題】プレハブ架線工法によって敷設された電線の弛度測定を容易にし、電線の弛度測定に要する労力を大幅に軽減することが可能な電線弛度測定方法および装置を提供する。
【解決手段】一方のポストと他方のポストとのそれぞれに電線の設計弛度を示す基準点を設け、一方のポスト基準点に、上下方向に延び他方のポストの基準点と電線の弛みの最下点を観測可能な高さ水準観測器20が昇降可能に取付けられる目盛り2f付きのスライド用レール2を固定し、高さ水準観測器20を水平方向に回動させることにより高さ水準観測器20の照準と電線の弛みの最下点との位置関係を比較し、照準が電線の最下点に合致していない場合は、高さ水準観測器20を昇降させて照準を電線の弛みの最下点に合致させ、照準と電線の最下点が合致した際の高さ水準観測器20の昇降量をスライド用レール2の目盛り2fによって読取る。
(もっと読む)
携帯機器および設置可否判定方法

【課題】 設置対象物の寸法測定機能を有する携帯機器、および、その携帯機器を使っての設置対象物の設置予定場所への設置の可否を判定する設置可否判定方法に関し、設置予定場所への設置が可能か否かを事前に通知させる。
【解決手段】 設置対象物の寸法を認識する寸法認識部と、設置対象物の設置予定場所、および設置予定場所へ至る搬送経路上の設置対象物通過の妨げとなり得る箇所の各寸法を記憶する寸法記憶部と、寸法認識部で寸法が認識された設置対象物を、搬送経路を通過して設置予定場所に設置することが寸法的に可能か否かを判定する設置可否判定部と、設置可否判定部での判定結果を通知する判定結果通知部とを有する。
(もっと読む)
検査装置および設置判定方法
【課題】設置後の被検査物体の使用状況を考慮して設置スペースに被検査物体が設置可能か否かを判定すること。
【解決手段】入力部102は、設置スペースを規定する多面において、被検査物体を構成する多面のうち正面に対応する面を設定し、設置スペースを規定する各面について、被検査物体の操作部及び可動部の設置を許可するか否かを設定し、判定部106は、被検査物体における操作部及び可動部の設置状況と、入力部102における設定結果とを比較することにより、被検査物体を構成する多面のうち正面を、設置スペースを規定する多面のうち正面として設定された面に向けた場合に、設置スペースに被検査物体が設置可能か否かを判定する。
(もっと読む)
掘削土留工における3次元計測システム
【課題】 掘削土留工の挙動を面的に評価できる土留壁の変位計測手法を用いることにより、構造物全体の挙動を把握するとともに、変位の原因を捉え易くする掘削土留工における3次元計測システムを提供することを目的とする。
【解決手段】
掘削土留工における3次元計測システムにおいて、土留壁10の面に配置される複数の高感度センサー11〜16と、この複数の高感度センサー11〜16の間を補完するように配置される複数の低感度センサー21〜80と、前記高感度センサー11〜16及び前記低感度センサー21〜80からの計測データを処理するデータ処理装置Aと、このデータ処理装置Aに接続される表示装置Bとを備え、前記土留壁10の面全体の変位データを計測し、前記土留壁10の面的な挙動を把握する。
(もっと読む)
手動式三次元測定装置、手動式三次元測定方法、及び手動式三次元測定用プログラム
【課題】手動式三次元測定の操作性及び正確性を向上させる。
【解決手段】手動式三次元測定装置は、被測定物2を測定する測定プローブ21と、測定プローブ21を三次元座標測定空間内において作業者が手動操作で移動させることができるように移動自在に支持する移動機構11〜13と、測定プローブ21の三次元座標空間内における位置情報を出力する位置情報出力部と、被測定物2の測定点情報を含むCAD情報を入力しこのCAD情報と測定プローブ21の位置情報とに基づいて測定プローブ21と測定点3との位置関係を逐次演算する位置演算部51と、位置演算部51の演算結果に基づいて測定プローブ21を測定点3で停止させるように移動機構11〜13による測定プローブ21の移動を規制する停止制御部53とを備える。
(もっと読む)
鋼材の変位表示方法及びシステム
【課題】鋼材の地中変位を、当該鋼材の挿入過程において、正確に把握することができ、しかも、装置コストが嵩まない鋼材の変位表示方法とする。
【解決手段】傾斜計11を用いて地中に挿入された鋼材2の傾斜情報を取得し、この傾斜情報を用いて鋼材2の変位を算出し、この算出変位を表示する方法であって、鋼材2の挿入に先立って、傾斜計11を鋼材先端部2aに固定し、鋼材2の挿入過程において、連続的に又は所定の深度ごとに傾斜情報を取得し、鋼材2の挿入完了後、傾斜計11を、この傾斜計11に取り付けた線材13を地上から引いて回収する。
(もっと読む)
特定部位検出方法、及び該方法を用いた試料分析装置
【課題】従来のデジタル画像相関法では負荷試験前後の試料上の同一点を探索するために輝度画像上で識別可能な模様が必要であり、こうした模様がない場合にはマーキングを行う必要があった。本発明ではこうしたマーキングを行うことなく高い精度での同一点探索を行えるようにする。
【解決手段】金属試料片では表面の平滑化処理を行っても、微細で且つ試料毎及び部位毎に相違する凹凸プロファイルが存在する。そこで、負荷試験前の試料の凹凸プロファイル(基準高さ分布)と負荷試験後の試料の凹凸プロファイル(比較対象高さ分布)とを用い(S1、S2)、デジタル画像相関法と同様の手法により相関係数の分布を求め(S3〜S8)、最大の相関係数を与える位置が同一点であるとして(S9、S10)、負荷試験前の試料上の注目点に対応する負荷試験後の試料上の点を求める。
(もっと読む)
測定プログラムのチェック方法及び測定機能を有する機械
【課題】動作内容を容易にチェックすることができ、信頼性の高い測定を行うことができる測定プログラムのチェック方法及び測定機能を有する機械を提供する。
【解決手段】測定プログラムの動作チェックをするチェックモードを選択して測定プログラムを起動し、表示手段60の画面上に文字で表示された測定プログラムの内容と画面上に図形、文字又は記号で表示された測定指令の内容とをチェックする。
(もっと読む)
タービン発電機におけるステータコイルの接続組立の3次元形状測定方法及び3次元形状測定装置用冶具
【課題】 レーザ非接触式3次元形状測定装置と多関節接触式3次元形状測定装置を併用することで、表面形状を容易に高精度に測定することにある。
【解決手段】 タービン発電機におけるステータコイル接続組立の3次元形状を測定するに際して、レーザ非接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第1のステップ(S11)と、エンコーダが内蔵された関節により複数本のアームを連結してなる多関節接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第2のステップ(S12〜S14)と、前記第1の測定ステップで測定された3次元形状データと前記第2の測定ステップで測定された3次元形状データ及び手計測による局所的な部位の形状測定データを総合的に合成して最終的にステータコイル接続組立の設計図を起こす第3のステップ(S17,S18)とを備えている。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
測定器
【課題】セッティング時の使い勝手を向上させることができるとともに、測定値の信頼性を維持しつつ、有効測定範囲を最大限使用可能な測定器を提供する。
【解決手段】本体と、本体に対して移動可能に構成されたスタイラスと、本体に対するスタイラスの変位量を検出するエンコーダ12と、エンコーダ12により検出された変位量から測定値を演算する演算部13と、演算部13が演算した測定値を表示する表示部14と、演算部に指令を与える操作部15,16と、スタイラスの移動ストロークの下限値よりも大きく、かつ、上限値よりも小さい有効測定範囲を記憶した記憶部17を備える。演算部13は、エンコーダ12により検出された変位量が記憶部17に記憶された有効測定範囲内であるか否かを判定し、その判定結果を表示部に表示する。
(もっと読む)
導通測定機及びこれを用いた導通測定方法
【課題】管路の内部撮影と内径測定を可能にすることによって、管路の導通測定時に正確性及び迅速性を向上させ、工事期間及び費用を減少できるようにした導通測定機及びこれを用いた導通測定方法を提供する。
【解決手段】管路内部に投入されるボディーと、前記ボディーの一端に連結され、前記管路内部を撮影してその情報を伝達するカメラと、前記ボディーに複数の支持バーを介して連結され、展開及び縮小可能に設けられる蓋部と、前記蓋部の展開及び縮小によって管路内部の直径を測定してその情報を伝達するために、前記ボディーの側面に設けられるセンサー部と、前記カメラとセンサー部からの情報を保存する保存部と、を備えた導通測定機を提供する。
(もっと読む)
信号処理装置、および測定機
【課題】 適切な重み因子に基づくフィルタ処理により、データに適切に追従するフィルタ出力値を得る信号処理装置を提供する。
【解決手段】 ディジタル信号値を経路に沿った複数の区間に分割する。それぞれの区間ごとに、ディジタル信号値とこのディジタル信号値に対するフィルタ出力値との成分ごとの自乗和に基づく離隔量について中間値を算出する。区間内のディジタル信号値について、各区間における中間値に基づいて重み因子を算出するとともに更新する。算出された重み因子を用いたフィルタ演算を実行してディジタル信号値に対するフィルタ出力値を得る。
(もっと読む)
変位計、およびそのデータ集録方法
【課題】センサー部を順番に設置して複数箇所の計測データをモニター部で集録して全体の変位を計測する変位計において、計測データ処理順番の誤りを低減した変位計を提供すること。
【解決手段】センサー部3とモニター部1と接続線2a、2bからなる変位計において、電源供給手段7の起動信号兼電源を供給してセンサー部が順次起動するようにして、起動時には後続のセンサー部を開放にした通信をおこない、また、複数のセンサー部がモニター部に計測データを順次送信するようにした。
(もっと読む)
構成部品の実測データを調査する方法および装置
【課題】光学走査に由来する、構成部品の実測データを調査する方法を改良する。
【解決手段】構成部品1の実測データ2を、構成部品の実測データを調査する仮想座標測定機の仮想測定スタイラスを生成する接触式座標測定機用測定プログラム24を用いて調査する。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 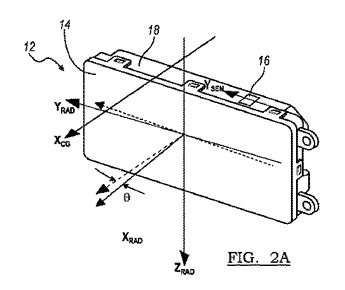 (もっと読む)
(もっと読む)
車両に対するスポイラの位置を検出する装置
【課題】 車両に対するスポイラの位置を検出する装置に関する。スポイラは、駆動ユニットによって引き込まれる1つの目標基準位置と少なくとも1つの引き出される目標駆動位置との間で移動可能である。この位置検出技術に関する。
【解決手段】 調整位置検出装置が設けられている。スポイラの現在の位置が、この調整位置検出装置によって検出可能であり、この調整位置検出装置は、この検出した現在の位置に基づいて第2位置信号を生成する。この場合、評価ユニットが設けられていて、この評価ユニットは、ホールセンサによって提供された第1位置信号及び調整位置検出装置によって提供された第2位置信号を評価し、この調整位置検出装置は、評価結果に基づいて位置検出装置のうちの少なくとも1つの位置検出装置の状態に関する情報を運転者に提供する情報装置及び/又は駆動ユニットを起動する。
(もっと読む)
パーツの偏差の自動的画像化方法
本発明の実施形態は、パーツ上に偏差の画像を表示する方法に関する。当該パーツはスキャンすることができる。当該パーツ上の偏差の位置が特定される。偏差の画像を当該パーツ上に表示することができる。他の実施形態では、一以上の表面上にパーツの偏差の画像が表示されるパーツが提供される。 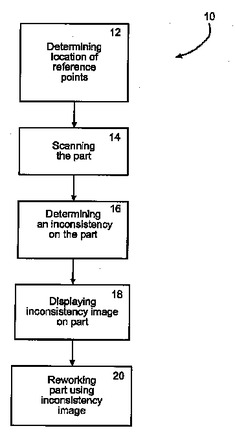 (もっと読む)
(もっと読む)
高速測定用の測定装置
高さ測定装置(1)は、垂直に移動可能な測定スライド(4)が、手動でも、クラッチ装置(15)を介した駆動モータ(14)を使用しても移動させることができるように取り付けられる測定コラム(3)を有する。測定スライド(4)は、駆動モータ(14)とクラッチ装置(15)とによって発生される一定の測定力を加工品の測定点に与える測定ヘッド(8)を有する。測定システム(19)は、測定ヘッド(8)の高さ座標を記録し、さらなる処理および評価のために、この高さ座標を制御装置(21)に送信する。制御装置(21)は、測定順序を自動化するための決定論理(33)を有する。上記決定論理は、ユーザが手動で行う特定の方向への測定ヘッド(8)の位置決めを自動的に検出し、次に、加工品を走査するために駆動モータ(14)を適切に駆動し、そして測定システム(19)からの信号を用いて、それぞれの測定に関連する一つまたは複数の測定値を決定する。オペレータが、所望の測定機能を独立して開始するために面でまたは孔でまたは軸で一方向にまたは逆方向に測定しようとすることを完全に自動的に検出するように、制御装置(21)を設定し得る。 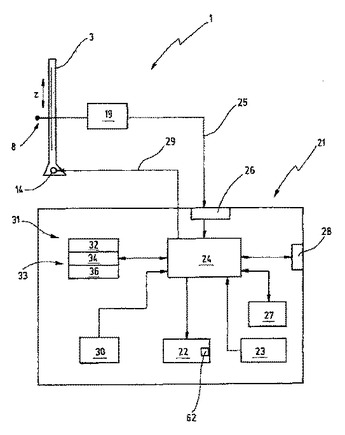 (もっと読む)
(もっと読む)
1 - 20 / 37
[ Back to top ]