
Fターム[2F075AA02]の内容
特定目的付指示記録装置と料金計量装置 (927) | 目的 (255) | 補償・補正・調整 (225) | 妨害する変量の影響を補償 (154)
Fターム[2F075AA02]の下位に属するFターム
Fターム[2F075AA02]に分類される特許
1 - 11 / 11
センシング装置及び電子機器
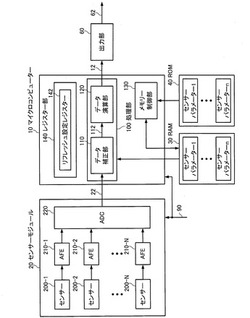
【課題】パラメーターの破壊に起因する性能の劣化を低減することができるセンシング装置及び電子機器を提供すること。
【解決手段】ROM40は、センサー1〜N(N≧1)に関連付けられるパラメーター(センサーパラメーター1〜n(n≧1))を記憶している。メモリー制御部130は、ROM40からセンサーパラメーター1〜nを読み出してRAM30に書き込んだ後、所与のタイミングで、ROM40からセンサーパラメーターを読み出してRAM30に上書きするリフレッシュ処理を行う。処理部100は、RAM30に書き込まれたセンサーパラメーター1〜nに基づいて、センサー1〜Nにの信号処理を行う。
(もっと読む)
サンプリングスキューエラー補正を有するプロセス装置
工業用プロセスを監視又は制御するための工業用プロセス装置(130)は、第1のプロセス変数PV1に関連する第1の複数のサンプルを受信するように構成された第1の入力と、第2のプロセス変数PV2に関連する第2の複数のサンプルを受信するように構成された第2の入力とを含む。補償回路(150A、B)は、第1の複数のサンプルと第2の複数のサンプルとの間の時差を補償して、第1及び第2のプロセス変数の少なくとも一方に関連する補償された出力を提供するように構成される。補償された出力を含むことができるか、又はそれを用いて第3のプロセス変数を算出することができる。第3のプロセス変数を用いて、工業用プロセスを監視又は制御することができる。 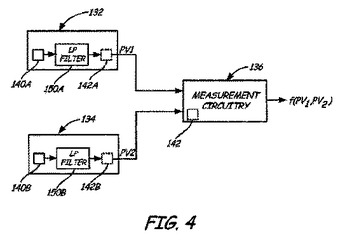 (もっと読む)
(もっと読む)
センサ装置およびその特性値調整方法

【課題】センサ部のトリミング処理に必要な精度を確保しつつ面積を低減する。
【解決手段】圧力センサなどのセンサチップで、製造工程や組み立て後に必要な特性値のずれを調整するトリミング処理について、レーザトリミング処理と電気トリミング処理を併用する構成を採用する。製造工程でウエハ状態でレーザトリミング処理S2を行い、センサ部の概略的なトリミングを行う。組み立て後に電気トリミング処理S5により、微調整をすることで精度を高めたトリミングを行うことができる。
(もっと読む)
連続するセクションでのパラメータ依存補正値近似線を決定するための方法およびセンサ装置
補正値近似線の連続するセクションでの決定のための方法の実施形態は、第1のパラメータ値が所定の条件を満たすか、トリガー条件が満たされているとき、センサ装置に関する第1のパラメータ値を有する第1の測定信号値を決定するステップと、第1のパラメータ値を変えて第2のパラメータ値を取得するステップと、第2のパラメータ値を有する第2の信号値を決定するステップと、第2の部分的セクション、第1のパラメータ値、第2のパラメータ値、第1の信号測定値、第2の測定信号値および最初の補正値を示す機能的関連に基づく第2のパラメータ範囲のための補正値近似線の第2の部分的セクションを決定するステップとを含む。 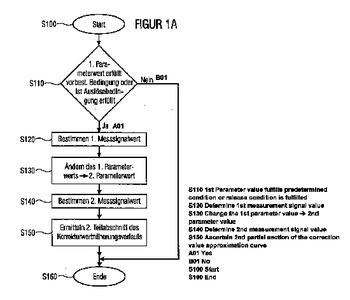 (もっと読む)
(もっと読む)
平滑化フィルタ装置および速度検出装置
【課題】暴れを有する時系列データをデータの暴れの振幅の中心付近の値に的確に平滑化することが可能な平滑化フィルタ装置およびそれを用いた速度検出装置を提供する。
【解決手段】時系列的に離散的に入力される物理量Xのデータを平滑化して出力する平滑化フィルタ装置1は、加算割合Pを決定する加算割合決定手段2と、今回入力された物理量Xのデータの入力値Xin(t)と所定周期前の出力値Xout(t-1)とを加算割合Pにより重み付け加算して算出した出力値Xout(t)を出力する平滑化手段3と、出力値の時間微分dXout(t)を算出して、出力値の時間微分の平滑化値dXs(t)を算出する時間微分平滑化値算出手段4とを備え、加算割合決定手段2は、入力値の時間微分dXin(t)を算出し、算出した入力値の時間微分dXin(t)と時間微分平滑化値算出手段4が算出した出力値の時間微分の平滑化値dXs(t-1)に基づいて加算割合Pを決定する。
(もっと読む)
影響因子推定装置及び影響因子推定プログラム
【課題】測定対象の状態に影響を与える可能性のある多数の影響因子から、測定対象の状態に強い影響を与える影響因子を推定し、測定対象の状態の予測に必要な影響因子だけを測定できるようにする。
【解決手段】多数の影響因子Fのなかから、影響因子選択部132が選択因子F’を選択し、特異値分解部133が特異値分解し、スコア値圧縮部136が圧縮スコア値行列U’を算出する。特徴度算出部134が特徴度Cを算出し、圧縮スコア値ベクトルQ’のバラツキが小さい場合に、判別式算出部137が算出した判別式の判別度を、判別度算出部138が算出し、判別精度がよい場合に、影響因子選択部132が選択した選択因子F’を、強影響因子出力部145が出力する。
(もっと読む)
環境データ収集システム
【課題】観測機器の設置場所や設置方法の選定や、得られたデータを真性値に補正するコンサルティング機能を含む環境データ収集システムを提供する。
【解決手段】センサにより得られた環境データを計測し、これを収集して所定のユーザー端末に環境データを提供するためのシステムにおいて、センサ1により得られた初期の環境データを収容する中間サーバー2を有し、この中間サーバー2には、センサ1固有の測定特性及びこのセンサ1の設置環境により現れる特有の測定誤差を収容した誤差データ群3と、入力された初期の環境データを誤差データ群3と照合して真理値を算出するデータ補正手段4とを設け、初期の環境データ群を中間サーバー2により補正してユーザー端末5側へ提供する。
(もっと読む)
電流出力式検出装置
【課題】消費電力量の増大化を抑制しつつ、電源電圧に変動が生じても検出精度の低下を抑制することができる電流出力式検出装置を提供する。
【解決手段】電流出力式検出装置1は、検出結果に応じて検出電流Ixとして出力する検出回路部4と、その検出回路部4を起動する起動機能部5とを備えている。起動機能部5は、該検出回路部4に対して一定の電流Inとなる電力を供給する電力供給回路部12と、自身に流れる電流量(起動電流Is)を安定化する電流安定回路部13とを備えている。
(もっと読む)
制御装置及び制御方法
【課題】 本発明は外乱によりステージが重心を中心にθ方向に回動したときの計測値から外乱成分を除去することを課題とする。
【解決手段】 メイン演算処理部70では、減算器72,74,76で各X,Y,θ軸毎の目標位置とレーザ干渉計18〜20の計測値との偏差を求め、この偏差がコントローラKx(s),Ky(s),Kθ(s)に供給される。コントローラは、各X,Y,θ軸毎の駆動トルクの制御値を演算する制御値演算手段78を有する。補正演算処理部80では、レーザ干渉計18〜20の計測値が供給されると共に、θ方向の外乱成分に対応した補正値KX(s)(θM yM),Ky(s)(θM xM)を算出する外乱成分演算手段81と、加算器82、減算器84でθ方向の補正値を基本軸であるX軸、Y軸の制御値fD1 fD2に加算、減算して重心基準のトルクに相当する制御値fx0
fy0を生成する補正手段86とを有する。
(もっと読む)
センサモジュールの設定方法
【課題】 実際の使用状態を反映するとともに、特性ばらつきを解消可能なセンサモジュールの設定方法を提供する
【解決手段】 センサモジュールに与える物理量を所定の値に設定し(ステップS2)、得られたセンサの検出値又はこれに対応する値を収集する(ステップS3)。これを複数回繰り返し(ステップS4)、集められたデータに基づき、検出値から計測値への適切な変換に必要な変換情報を生成又は選択する(ステップS5)。そして、この変換情報をセンサモジュール内のメモリに記憶させる(ステップS6,S7)。これにより、実際の使用状態に即した特性ばらつきを考慮した設定が行われることになる。したがって、センサ自体に特性ばらつきが存在したり、信号処理部などから受ける影響が異なっていても、センサモジュールは正しい物理量を表す計測値を送信することが可能となる。
(もっと読む)
視認状況測定装置
【課題】 監視カメラ等の撮像手段を用いながらも、外光の影響及び種々の変動要因の影響を低減することができ、これにより、視認状況を示す測定結果を高い精度で得る。
【解決手段】 指標6は、発光可能な第1の領域と、この領域から位置のずれた非発光の第2の領域とを有する。監視カメラ1は、前記第1及び第2の領域を撮像する。処理装置3は、第1の領域の発光時に得られた画像に基づく発光時第1領域撮像輝度情報L及び発光時第2領域撮像輝度情報Vと、第1の領域の非発光時に得られた画像に基づく非発光時第1領域撮像輝度情報L0及び非発光時第2領域撮像輝度情報V0とを、取得する。処理装置3は、第1領域差分輝度情報Lr=L−L0と第2領域差分輝度情報Vr=V−V0との比Lr/Vrを取得し、この比Lr/Vrに応じて視程を得てこれを出力する。
(もっと読む)
1 - 11 / 11
[ Back to top ]