
Fターム[2F077TT31]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802)
Fターム[2F077TT31]の下位に属するFターム
2値化 (127)
多値化 (88)
比較器、シュミット回路、差動増幅器を使うもの (198)
ヒステリシス特性を持つもの (13)
可変閾値を用いるもの (13)
レゾルバ−デジタル変換 (154)
シンクロ−デジタル変換 (4)
Fターム[2F077TT31]に分類される特許
1 - 20 / 205
位置検出回路および位置制御装置
位置検出装置
【課題】記憶回路の冗長性を確保すると共に、電源電圧が低下した場合に所望の出力を得ることの可能な位置検出装置を提供する。
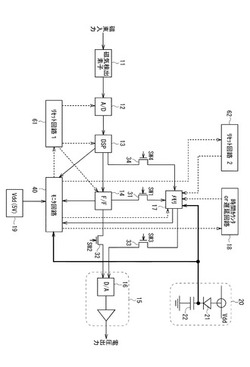
【解決手段】位置検出装置としての磁気検出IC10は、通常動作モードの際、磁気検出素子11から出力された信号をDSP13によって処理した後、F/F14に記憶し、D/A16を経由して外部へ出力する。その際、F/F14の出力値をメモリ17が記憶する。モニタ回路40は、電源瞬断モードを検知すると、F/F14とメモリ17との間の信号、およびF/F14とD/A16との間の信号を遮断する。そして更新を止めたメモリ17の信号をD/A16へ出力する。一方、モニタ回路40は、長時間電源落ち込みモードを検知すると、メモリ17の信号をHiまたはLoに固定し、D/A16へ出力する。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
インターフェース回路
【課題】本発明は、回転信号のレベルを自動調整し、かつ、回転信号入力回路のゲインを変化させることにより、ノイズに強く、かつ、低消費電力のインターフェース回路を得ることを目的とする。
【解決手段】本発明によるインターフェース回路は、第1、第2回転信号(K・G・sinθ・F(t),K・G・cosθ・F(t))を用いて1次側信号(F(t))の入力信号レベルを調整することにより、前記回転信号(K・sinθ・F(t),K・cosθ・F(t))の回転信号レベルを自動調整する自動調整機能と、前記回転信号(K・sinθ・F(t),K・cosθ・F(t))を回転信号処理器(50)に入力する際の第1、第2回転信号入力回路(110,111)のゲインを変化させるゲイン変化機能と、を有する構成である。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 磁気センサ10は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号及びB相出力信号のそれぞれにおいて、サンプリング値とそれを180度シフトしたサンプリング値の差が最小となる同一位相のサンプリング値を抽出し、前記抽出したサンプリング値の平均値をオフセット補正値として計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正して検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】検出精度を向上させ、高精度を有するエンコーダを提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
磁気センサ装置
【課題】磁気抵抗素子が内部に配置されるヘッド部の取付位置の調整を容易に行うことが可能で、かつ、外部からの電気的なノイズに対する耐ノイズ性を高めることが可能な磁気センサ装置を提供する。
【解決手段】磁気抵抗素子3を備える磁気センサ装置は、磁気抵抗素子3が内部に配置される筺体10と、磁気センサ装置の状態を示すための発光体8とを備えている。発光体8は、筺体10の内部に配置され、筺体10には、発光体8から発せられる可視光が筺体10の外部から見えるように開口する開口部11aが形成されている。開口部11aは、可視光を透過させる可視光透過性と導電性とを有するカバー部材15によって塞がれている。
(もっと読む)
レゾルバによる角度検出方法
【課題】第1の信号と第2の信号を同時に検出するハードウェア構成がなくても、第1の信号と第2の信号の振幅比を正確に検出し、精度良く角度を検出するレゾルバによる角度検出方法を得る。
【解決手段】1相励磁2相出力のレゾルバから得られる2相の正弦波変調信号である第1の信号及び第2の信号を、同期検波して回転体の回転角度を検出する方法であって、前記第1の信号、前記第2の信号の順に信号を検出する第1の信号検出過程と、前記第2の信号、前記第1の信号の順に信号を検出する第2の信号検出過程とを備えている、
(もっと読む)
物理量検出装置、および物理量検出装置の検査方法
【課題】 出力波形の形状に影響されず補正の精確さを高める物理量検出装置、および物理量検出装置の検査方法を提供する。
【解決手段】ホール素子11は、ヨーク30の回転角の変化に応じた信号を出力する。DSP12は、予め記憶されている所定補正値に基づいてホール素子11の実出力値を補正し、補正された値に基づいてヨーク30の回転角を算出して出力する。所定補正値算出手段は、所定補正値を算出する。また、所定補正値算出手段は、所定回転角範囲内の実出力値に対して一次関数補間処理を行うことで算出される補間後実出力値と、当該補間後実出力値に対応する実出力値との差である一次誤差量に基づいて所定補正値を設定する
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、検出信号の信頼性と検出精度とが低い。
【解決手段】複数の磁気センサ10は、正弦波波形と余弦波波形の検出信号を出力する。デジタルフィルタ30は、アナログデジタル変換器20でデジタル変換された検出信号を移動平均して振動成分を濾波する。変位補正器40は、不正な変位が発生する位相角帯域における正側にある検出信号を所定量マイナス方向に偏位させ、負側にある検出信号を所定量プラス方向に偏位させて、不正な変位を補正して除去する。位置演算器70は、検出信号から位置データを生成して出力する。ピッチ補正器80は、位置データを移動方向に合わせてピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
レゾルバの駆動装置
【課題】レゾルバの角度データを必要とするタイミングでレゾルバの励磁を行うことで、省電力化したレゾルバの駆動を可能とする。
【解決手段】励磁パルス出力回路105は、角度検出の要求信号を受けて励磁パルス信号を出力する。ここで、励磁パルス出力回路105は、角度検出の要求信号を受け付けた場合のみに励磁パルス信号を出力するので、常時励磁パルス信号を出力する場合に比較して、励磁に要する消費電力を抑えることができる。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
多軸センサ出力補正装置及び多軸センサ出力補正方法
【課題】物理量測定素子の感知方向と標準座標系の対応する標準軸とがずれても、標準軸の感度の直交性を有する物理量を求める多軸センサ出力補正装置及び方法を提供する。
【解決手段】本発明の多軸センサ出力補正装置は、一つの物理量における特定方向の成分を測定する軸センサを複数組み合わせて構成された多軸センサの軸センサ毎の軸センサ測定物理量を、標準座標系の標準軸に対する軸ずれを補正し、標準軸に対応する軸センサ対応物理量に補正する装置であり、軸センサ各々が測定する軸センサ測定物理量を、標準軸の軸センサ対応物理量に補正する補正係数が記憶された記憶部と、この記憶部の補正係数により、軸センサ測定物理量を軸センサ対応物理量に補正する測定値補正部を有し、標準座標系における方向と強さとが自明の物理量である印加物理量を、軸センサに与えて軸センサ出力値を得て、印加物理量と軸センサ出力値から補正係数が求められている。
(もっと読む)
信号処理装置及び回転角度検出装置
【課題】ホール素子に供給するバイアス電流の向きを2相のクロック信号に同期して順次交互に切替えることによって前記ホール素子から検出されるホール起電力信号を変調し、該変調されたホール起電力信号を前記クロック信号に同期して復調する変調−復調処理を行った後ΔΣ変調器でΔΣ変調し、該ΔΣ変調された信号からオフセット成分を周波数分離して除去するオフセットキャンセル処理を行い、且つ、前記ΔΣ変調器の積分器での積分動作の繰り返しにおけるデューティー比を調整するゲイン調整信号に基づいてゲイン調整を行う場合に、オフセットキャンセルの精度が損なわれないホール起電力信号検出装置などの信号処理装置を実現する。
【解決手段】クロック信号生成器によって発せられるクロック信号の各隣接する半周期の期間毎に各1つのゲイン調整を行うパルス信号を生成するゲイン調整信号生成器145を設けた。
(もっと読む)
多回転位置センサ付軸受及び回転装置
【課題】組み立てコストを抑えながらコンパクトな多回転位置センサ付軸受及び回転装置を提供する。
【解決手段】回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
回転検出装置および回転検出方法
【課題】電磁ピックアップから出力される電圧信号に基づいて信号線の異常の予兆をとらえ、信号線の異常が実際に生じる前に修理等が可能な回転検出装置および回転検出方法を提供する。
【解決手段】回転歯車と、回転歯車の周面に近接して配置され回転歯車の歯の通過に伴い電圧信号を出力する電磁ピックアップと、電磁ピックアップからの電圧信号を受けて回転歯車の回転状態を検出する回転検出手段と、を備えた回転検出装置等において、回転歯車の回転数の安定状態を検出する安定状態検出手段と、回転数の安定状態において検出される電圧信号の振幅の変動幅Vcが基準値Vc0以上であるか否かを判別することにより電圧信号を伝送するための信号線の異常を予知する異常検出手段と、を備える。
(もっと読む)
1 - 20 / 205
[ Back to top ]