
Fターム[2F077TT35]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802) | 比較器、シュミット回路、差動増幅器を使うもの (198)
Fターム[2F077TT35]に分類される特許
1 - 20 / 198
位置検出装置
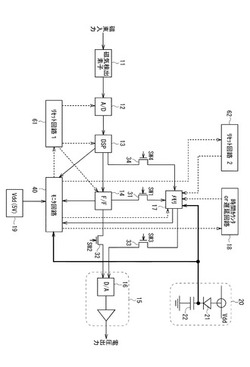
【課題】記憶回路の冗長性を確保すると共に、電源電圧が低下した場合に所望の出力を得ることの可能な位置検出装置を提供する。
【解決手段】位置検出装置としての磁気検出IC10は、通常動作モードの際、磁気検出素子11から出力された信号をDSP13によって処理した後、F/F14に記憶し、D/A16を経由して外部へ出力する。その際、F/F14の出力値をメモリ17が記憶する。モニタ回路40は、電源瞬断モードを検知すると、F/F14とメモリ17との間の信号、およびF/F14とD/A16との間の信号を遮断する。そして更新を止めたメモリ17の信号をD/A16へ出力する。一方、モニタ回路40は、長時間電源落ち込みモードを検知すると、メモリ17の信号をHiまたはLoに固定し、D/A16へ出力する。
(もっと読む)
位置検出装置及び位置検出方法並びにそれを用いた電子機器

【課題】長い距離にわたって温度に依存することなく高いリニアリティを比較的小さな機構体積で確保すること。
【解決手段】3個のホール素子のうち中心位置にある第2のホール素子81bと、この第2のホール素子に対して等間隔に配置された第1及び第3のホール素子81a,81cとを備え、比較判定回路83は、第2のホール素子81bからの出力信号の第2の差分信号の正負を判定して、この第2の差分信号が正(0を含む)ならば、第1のホール素子81aからの出力信号の第1の差分信号を出力し、第2の差分信号が負ならば、第3のホール素子81cからの出力信号の第3の差分信号を出力する。除算器84は、第2の差分信号を第1の差分信号で除算、もしくは第2の差分信号を第3の差分信号で除算する。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
回転角度検出装置
【課題】電源回路の電圧変動が発生したときに生成されるノイズが出力される信号に含まれることを抑制することのできる回転角度検出装置を提供する。
【解決手段】電源回路80の電圧が所定範囲内である場合は第1信号を出力し、電源回路80の電圧が所定範囲外である場合は第2信号を出力する電源変動検出手段50を備える。そして、出力回路60は、比較器30から出力されたパルス信号および第1信号または第2信号が入力され、第2信号が入力されている期間は、第2信号が入力される前に比較器30から出力されたパルス信号に基づいてこの期間に比較器30から出力されると予測される第1予測パルス信号を出力する予測出力手段61と、比較器30から出力されたパルス信号および第1予測パルス信号が入力され、第2信号が出力されている期間は第1予測パルス信号を出力する出力調整手段62とを有する構成とする。
(もっと読む)
磁気検出装置
【課題】 特に、センターずれが生じても従来に比べて出力誤差(角度誤差)を小さくすることが可能な磁気検出装置を提供することを目的とする。
【解決手段】 軸部30を有する回転体と、軸受部31を有して回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有する。軸受部31の底面31bの径D1は、軸部30の先端面30bの径D2より大きく形成されている。軸受部31の第1の側面31a及び軸部30の第2の側面30aはともに底面及び前記先端面に対する垂直方向から傾いて形成されており、第1の側面31aの前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、第2の側面30aの前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さい。これによりセンターずれが生じると、軸部30は横ずれした後、傾く。
(もっと読む)
交流発電機の位相検出装置及びその方法
【課題】従来より、蓄電池スタンバイによるリーク電流が増加し、特に高温の環境下において整流素子のリーク電流が大幅に向上することによって、車両における電池(又は蓄電池)のスタンバイ時間が低下し、さらに車両がスムーズに起動できない問題がある。本発明は、車両における蓄電池のリーク電流を低く制御することができる交流発電機の位相検出装置及びその方法を提供する。
【解決手段】本発明は、波形検出器、閾値電圧生成器及びコンパレータを含む交流発電機の位相検出装置を提供する。波形検出器は、位相信号のピークを検出することにより波形検出信号を生成する。閾値電圧生成器は、波形検出信号に基づいて参照信号を生成する。コンパレータは、位相信号及び参照信号を比較することにより比較信号を出力する。従って、本発明に係る交流発電機の位相検出装置により、車両における蓄電池のリーク電流を低く制御することができる。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、当該第一部材の側面の側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、第一部材のうち光の入射面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
磁気−デジタル変換器、回転センサ及び回転角センサ
【課題】磁気抵抗の変化を従来技術に比較して小規模な回路で高精度なデジタル値として得ることができる磁気−デジタル変換器並びにそれを用いた回転センサ及び回転角センサを提供する。
【解決手段】磁気−デジタル変換器は、接地された接続点で互い接続された1対の磁気抵抗素子であって、上記接続点に接続された各第1の端子と、接地されない各第2の端子とを有し、磁界の変化を示す1対の信号を各第2の端子から出力する1対の磁気抵抗素子と、上記1対の磁気抵抗素子からそれぞれ出力される1対の信号をΔΣ変調して差動ΔΣ変調信号を出力するΔΣ変調手段と、上記ΔΣ変調手段からのΔΣ変調信号から上記磁界の変化を示すデジタル信号を取り出して出力するデジタルフィルタとを備えて構成される。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び当該第一部材のうち光の入射面に対して反対の面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
インダクタンス変化検出回路、変位検出装置及び金属検出装置
【課題】単一のコイルでインダクタンスの変化を効果的に検出し、小型でありながら高精度な変位センサを実現するためのインダクタンス変化検出回路と、これを用いる変位検出装置及び金属検出装置を提供する。
【解決手段】矩形波交流電圧源にコイルを接続し、コイルに流れる交流電流を電圧信号に変換した後、ヒステリシス特性を有するコンパレータを通すことで、コイルのインダクタンス変化をパルスの立ち上がりの位相変化として検出する。従来技術のように二つのコイルを設ける必要がなく、部品点数が少なくなるので、低コストで高精度な変位センサを実現できる。
(もっと読む)
変位量検出装置
【課題】変位センサの電気的失陥と機構的失陥とを、故障検知方法やシステムを複雑化することなく簡便且つ正確に検出すること。
【解決手段】センサ軸24は連結部34によるペダル10との機械的な連結を解かれた状態ではセンサ本体22に対して正常時の相対変位レンジを超える位置に変位する設定になっており、センサ出力値が前記相対変位レンジにおける最大値より大きい所定の上限設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より小さい所定の下限設定値を下回った場合には異常判定を行う電気的異常判定手段と、センサ出力値が前記相対変位レンジにおける最大値より所定量大きい設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より所定量小さい設定値を下回るった場合には異常判定を行う機構的失陥異常判定手段とを設ける。
(もっと読む)
静電容量検出装置
【課題】ノイズ検出用の電極を別途設けることなく、ノイズの有無を検出できる静電容量検出装置を提供する。
【解決手段】静電容量を形成する検出電極100と、検出電極100に電流を供給する電流供給部110と、電流供給部110から検出電極100へ電流を供給する条件を異なる条件に変化させ、それぞれの異なる条件での検出電極100の出力値に基づいて検出電極100に電磁ノイズが印加されたかどうかを判断する制御を行なう制御部200と、を有して静電容量検出装置10を構成する。これにより、別途、ノイズ検出部を設けることなく、静電容量を検出するための検出電極100のみを有し、この検出電極100において静電容量の検出とノイズの有無の検出が可能となる。
(もっと読む)
磁気センサ調整方法、及び、磁気センサ調整装置
【課題】磁気センサの調整が煩雑となることが抑制された磁気センサ調整方法、及び、磁気センサ調整装置を提供する。
【解決手段】磁電変換素子(20)、磁石(30)、及び、磁電変換素子(20)の出力信号を閾値電圧に基づいて二値化する信号処理部(43)を有する磁気センサ(10)の出力特性を調整する磁気センサ調整方法であって、磁性体(70)と磁気センサ(10)との距離が第1距離の時の磁電変換素子(20)の第1出力信号の電圧値Va、及び、磁性体(70)と磁気センサ(10)との距離が第2距離の時に出力される磁電変換素子(20)の第2出力信号の電圧値Vbを計測し、磁電変換素子(20)の出力特性に関わる係数をa,b、閾値電圧をVthとすると、Vth=a×ln(Vb−Va)+b+Vaが成立するように磁電変換素子(20)の出力信号の電圧レベルを調整する。
(もっと読む)
エンコーダ装置、及び駆動装置
【課題】検出精度を向上する。
【解決手段】エンコーダ装置は、被駆動体の位置に対応する信号を出力する検出部と、位置を示す第1位置情報を補正する補正値情報を記憶する記憶部と、被駆動体の位置に対応する信号に基づいて第1位置情報を生成し、生成した第1位置情報を、記憶部から読み出した補正値情報に基づいて補正する信号処理部とを備える。また、補正値情報は、位置に対応して測定された位置情報の誤差を示す誤差特性に基づいて生成された情報であって、誤差特性を所定の位置情報における複数の区間に分割し、分割した区間の境界ごとに、当該境界の前後の区間における誤差特性に基づいて生成された境界における近似値を平均して生成された誤差情報と、境界の位置を示す第2位置情報とが関連付けられた情報を有する。
(もっと読む)
磁気式エンコーダ
【課題】長さ寸法や角度などを測定する計測器具の用途に適した高精度・高信頼度でかつ安価な磁気式エンコーダを実現すること。
【解決手段】同一ピッチでN極とS極が交互に着磁されたテープ状磁気スケール部材を外周面に貼り付けて構成された磁気記録回転体と、磁気記録回転体に近接配置したA相、B相の磁気情報検出出力を出力する磁気情報検出手段とを有し、テープ状磁気スケール部材の両端部における出力信号の変化に基づいてZ相の信号出力が得られるようにした。また、磁気情報検出手段を適当な間隔で2個以上配設することで、磁気シート部材の貼り付け範囲の角度以上の回転角度の情報を得ることができるようにした。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
回転角検出装置
【課題】複数のセンサの出力信号うちの1つの出力信号に異常が発生した場合に、異常が発生した出力信号を特定できるとともに、正常な他の出力信号に基づいて正確な回転角を演算することが可能となる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、第1の回転角演算部21、第2の回転角演算部22、第3の回転角演算部23、異常監視部24および最終回転角演算部25を含む。異常監視部24は、第1、第2および第3の出力信号V1,V2,V3に基づいて、各出力信号V1,V2,V3が正常であるか異常であるかを判定する。最終回転角演算部25は、異常監視部24の最終判定結果と、第1、第2および第3の回転角演算部21,22,23によってそれぞれ演算された第1、第2および第3の回転角θ1,θ2,θ3に基づいて、最終的な回転角θを演算する。
(もっと読む)
1 - 20 / 198
[ Back to top ]