
Fターム[2F077TT71]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | カウンタを用いる信号処理 (278)
Fターム[2F077TT71]の下位に属するFターム
アップ・ダウンカウンタ (77)
位相検出に用いるもの (26)
パルス幅検出に用いるもの (13)
パルス間隔検出に用いるもの (8)
時間の検出に用いるもの (20)
周波数の分周又は逓倍に用いるもの (12)
Fターム[2F077TT71]に分類される特許
1 - 20 / 122
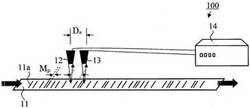
エンコーダシステム
【課題】原点検出精度を向上させた信頼性の高いエンコーダシステムを提供する。
【解決手段】エンコーダシステム100は、複数のマークを備えた担持体11と、担持体11の移動方向に第1の距離だけ互いにずらして設けられ、複数のマークを読み取り可能なセンサ12、13と、センサ12、13の検出信号を演算処理する演算処理部14とを有し、演算処理部14は、担持体11がセンサ12、13に対して相対移動している際に、複数のマークのうち一つのマークが第1の距離だけ移動するのに要する第1の時間、および、複数のマークのうち隣接する二つのマークがセンサ12またはセンサ13による検出位置を通過するのに要する第2の時間を演算し、第1の時間および第2の時間から算出された第1の指標が原点位置を特徴付ける第2の指標に相当する場合、第1の指標の算出に用いられたマークパターンを原点マークパターンであると判定する。
(もっと読む)
信号変換装置の検査システム

【課題】信号変換装置を効率的に検査することのできる信号変換装置の検査システムを提供することを目的とする。
【解決手段】信号発生器2は、検査用入力信号を被検査体である信号変換装置10に出力する。ここで、検査用入力信号は、例えば、周波数が連続的な値を取り、かつ、周波数が被検査体である信号変換装置10に要求される周波数範囲の上限値と下限値との間で変化する信号とされている。信号変換装置10では、検査用入力信号に対する出力信号が生成され、この出力信号が処理装置3に出力される。処理装置3は、被検査体である信号変換装置10からの出力信号に基づいて信号変換装置10の異常判定を行う。
(もっと読む)
エレベータのエンコーダ監視装置およびエレベータのエンコーダ監視方法
【課題】ハードウェアの簡素化、および低コスト化を実現する。
【解決手段】エンコーダから出力される2つのパルス信号の状態変化に基づいてパルス抜けを検出するものであって、第2のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第1のパルス出力信号の状態をラッチする第1のDラッチ回路部(11)と、第1のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第2のパルス出力信号の状態をラッチする第2のDラッチ回路部(12)と、Dラッチ回路部(11、12)のそれぞれのラッチ信号の排他的論理和を出力する排他的論理和ロジック部(13)と、排他的論理和ロジック部からの出力信号がHigh状態からLo状態に切り替わったことで、パルス抜けを検出し、異常信号として外部に出力する出力処理部(14、16、17)とを備える。
(もっと読む)
デジタル角度出力信号の出力方法及び装置
【課題】本発明は、閉ループの負帰還制御型の回転信号処理器の閉ループ内で制御偏差演算による補正及び補正値テーブルを用いた補正を行って制御偏差を0とすることを目的とする。
【解決手段】本発明によるデジタル角度出力信号の出力方法及び装置は、回転角検出器(12)の角度誤差、回転信号処理器(14)における演算過程で生じる誤差信号に起因する角度誤差を閉ループ(200)内の制御偏差演算〔ε=K・sin(θ-φ)〕の段階でデジタル補正し、さらに、デジタル角度出力信号(φ)に角度依存の誤差〔△θ(θ)〕が存在した場合、誤差〔△θ(θ)〕を予め閉ループ(200)内の補正値テーブル(52a)に格納して用いる方法と構成である。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
運動検出装置
【課題】磁界検出部の個数を少なくすると共に、検出パルスの欠落が生じても回転数または周回数を正確に計数できるようにする。
【解決手段】被検出体と共に回転する可動部43には磁石51〜54が設けられ、可動部43の外周側には大バルクハウゼン効果により検出パルスを出力する磁気センサ61〜63が設けられ、磁石51〜54および磁気センサ61〜63の配置は、磁石51〜54において、可動部43が右回転する間に各磁気センサ61〜63の磁化の方向を反転させる点を右回転反応点R1、R2、R3、R4とすると、磁気センサ61〜63のうちの1つの磁気センサが上記右回転反応点のうちの1つと向かい合うとき、磁気センサ61〜63のうちの他の各磁気センサが上記右回転反応点のいずれとも向かい合わない等の条件を充足するように設定されている。
(もっと読む)
エンコーダ
【課題】位置検出信号を増設することなく可及的に精度よく故障を検出すること。
【解決手段】エンコーダは、周期が異なる位置検出信号としての電気信号を夫々発生させる複数系統の位置検出信号発生系(光源1、トラック3a〜3c、受光素子ユニット4a〜4c)と、複数系統の位置検出信号発生系が夫々発生させた位置検出信号に基づいて第1位置データを算出する第1演算部として機能する電気角第1算出部8および1回転内位置データ第1作成部9と、第1演算部よりも少ない系統の位置検出信号発生系が発生させた電気信号に基づいて第2位置データを算出する第2演算部として機能する電気角第2算出部11および1回転内位置データ第2作成部12と、第1位置データと第2位置データとの比較に基づいて自エンコーダが故障しているか否かを判定する故障判定部としての比較部10と、を備える。
(もっと読む)
弾性表面波センサ
【課題】1つのSAWデバイスによって、歪みと温度の両方を測定できるSAWセンサを提供する。
【解決手段】SAWデバイス1を測定物20の一面201上に配置し、SAWデバイス1の基板下面102のうち伝搬路13の真下に位置する領域102aを測定物20に固定し、基板下面102のうち駆動電極11および反射器12の真下に位置する領域102b、102cを測定物20に固定しない構造とする。この構造では、測定物に歪みが生じると、基板上面の伝搬路13のみに歪みが生じることとなり、反射器12で反射した弾性表面波に位相変化が生じる。このときの位相変化は温度変化の影響をほとんど受けないので、この位相変化から測定物の歪みを測定できる。また、この構造では、SAWデバイス1の共振周波数は、温度変化によって変化し、測定物の歪みの影響を受けないので、共振周波数変化から温度を測定できる。
(もっと読む)
高分解能非接触式多回転検出システムおよび方法
【課題】高分解能で非接触の態様でシャフトの多回転位置を計測するシステムおよび方法を提供すること。
【解決手段】一実施形態で、多回転検出装置は、シャフトによってなされた回転数を決定するように構成された回転カウンタと、所定の回転の中でシャフトの角度位置を計測するように構成された角度位置センサとを含むことが可能である。回転数は、Mビットの分解能によって決定可能であり、1回転当たりの角度位置は、Nビットの分解能によって計測可能である。適切に選択されているので、回転カウンタは、比較的低い分解能として作動するように構成可能であるが、多回転検出装置は、全範囲にわたって1回転当たりNビットの角度分解能を維持することが可能である。したがって、多回転検出装置はM+Nビットの実効分解能を有することが可能である。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
エンコーダ補正装置
【課題】モータ取り付け時のヒューマンエラーや、エンコーダ間の同心度悪化による補正精度の悪化を抑えるとともに、生産性の向上を図ることができるエンコーダ補正装置を得ること。
【解決手段】エンコーダ補正装置は、被試験モータ2の位置検出を行う被試験エンコーダ1を補正するエンコーダ補正装置であって、基準エンコーダ4と、基準エンコーダに取り付けられて、被試験モータのモータシャフト6と基準エンコーダの中心軸とを連結させる連結部5,7と、基準エンコーダの中心軸に垂直な面に沿って基準エンコーダを自由に移動可能に支持する支持部3と、を備える。
(もっと読む)
モータロータ及びモータ
【課題】回転検出器の構成部品の一部を省略して回転検出器付きモータの全体構成の部品点数と工数を削減すること。
【解決手段】回転検出器付きモータ1は、回転軸5と、回転軸5の周りに配置され、軸方向に延びる複数の貫通孔6aが設けられる鉄心部6と、複数の貫通孔6aにそれぞれ収容される複数の永久磁石7と、複数の貫通孔6aの開口を塞ぐように鉄心部6の両端に設けられる一対の端板8A,8Bと、コイル3aを含むモータステータ3とを備える。両端板8A,8Bは、非磁性体で構成され、一方の端板8Aの軸方向外面に、周方向に交互に配置された角度検出用の凹凸が設けられる。モータロータ4の端板8Aの軸方向外面に設けられた凹凸に対向する位置には、高周波信号が入力される励磁コイルを備えたセンサステータ13が設けられる。
(もっと読む)
セグメントカウンタと精密位置センサとを同期させるための方法および装置
【課題】本発明は、ウィーガンドセンサに基づくセグメントカウンタの値と精密位置センサの値とを正確に同期させるための新規なスペースおよびコストを節約した方法を提供する。また、この方法を実行するための装置を提供する。
【解決手段】ウィーガンドセンサを含むセグメントカウンタのカウント値と精密位置センサのポジション値との絶対同期化のために、セグメントカウンタのウィーガンドワイヤの最後の磁化方向を情報の一部として使用して、カウント値とポジション値とを全ポジション値へとエラー無く変換するための方法およびこの方法を実行するための装置。
(もっと読む)
位置検出用スケールの計測装置、位置検出用スケールの計測方法、及びスケールの製造方法
【課題】位置検出用スケールの誤差を検出する精度を向上させる。
【解決手段】位置検出用スケールの計測装置は、位置検出に使用されるスケールの位置情報を検出する複数の検出部を有し、スケールに対して移動方向に相対的に移動する位置検出部と、複数の検出部のうち少なくとも2つの検出部による検出結果に基づいて、スケールの誤差を検出する誤差検出部と、を備える。そして、複数の検出部のうち少なくとも2つの検出部は、移動方向において互いに所定の第1間隔で配置されている。
(もっと読む)
位置検出装置およびモータ駆動装置
【課題】主に、変位検出部の検出分解能を変更することなく、検出する位置情報の分解能を設定、変更することができるようにする。
【解決手段】位置検出部(エンコーダ1、ホールIC6)と、変位検出部(エンコーダ1)と、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)とを備える。そして、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)を、変位パルス(エンコーダパルスenca)のエッジが所定の区間エッジ数(分周比分母DEN)だけ到来する間に、区間エッジ数(分周比分母DEN)よりも小さい所定の非カウント数(分周比分母DENと分周比分子NUMとの差)だけ変位パルス(エンコーダパルスenca)のエッジをマスクしてカウントし得るように構成する。
(もっと読む)
信号処理装置及び回転角度検出装置
【課題】ホール素子に供給するバイアス電流の向きを2相のクロック信号に同期して順次交互に切替えることによって前記ホール素子から検出されるホール起電力信号を変調し、該変調されたホール起電力信号を前記クロック信号に同期して復調する変調−復調処理を行った後ΔΣ変調器でΔΣ変調し、該ΔΣ変調された信号からオフセット成分を周波数分離して除去するオフセットキャンセル処理を行い、且つ、前記ΔΣ変調器の積分器での積分動作の繰り返しにおけるデューティー比を調整するゲイン調整信号に基づいてゲイン調整を行う場合に、オフセットキャンセルの精度が損なわれないホール起電力信号検出装置などの信号処理装置を実現する。
【解決手段】クロック信号生成器によって発せられるクロック信号の各隣接する半周期の期間毎に各1つのゲイン調整を行うパルス信号を生成するゲイン調整信号生成器145を設けた。
(もっと読む)
レゾルバの異常検出装置
【課題】二乗和の値が上記正常範囲の内外にまたがって変動することがあっても、レゾルバの異常を正確に且つ安定して検出できるレゾルバの異常検出装置を提供することを目的とする。
【解決手段】レゾルバに異常が発生した場合に、正弦信号と余弦信号を読み込み、正弦信号及び余弦信号の読み込み値又はその二乗値からレゾルバの異常判定を禁止するかどうかを判定するようにし、レゾルバの異常判定を禁止しないと判定しているときには上記検査値が正常範囲を外れる度にカウント値を累積して増加させ、そのカウント値が所定値以上になったときにレゾルバが異常であるものと判断させるようにした。
(もっと読む)
角度検出装置およびその偏心量推定方法
【課題】特殊な目盛盤を必要とせず、二次元平面で偏心する目盛盤の偏心量をも正確に測定することができる角度検出装置およびその偏心量推定方法を提供すること。
【解決手段】回転軸13に支持された目盛盤12と、目盛盤12の表面に近接されかつ目盛盤12の周方向に等間隔で配置された3個以上の検出器14とを有する角度検出装置において、目盛盤12を所定の初期位置から基準角度θN回転させた際の回転角度θiを各検出器14で検出し、回転角度と基準角度との差から各検出器における角度誤差を測定し、回転中心Oaに対する各検出器の方向ベクトルPiを90度回転させて接線方向ベクトルqiを取得し、接線方向ベクトルqiとの内積が角度誤差になる偏心ベクトルeを演算する。
(もっと読む)
インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法
【課題】インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法を提供する。
【解決手段】監視ユニット200において、走査ユニット16によるインクリメンタル目盛格子トラック14の走査から得られ、互いに位相がずれている少なくとも2つの位置信号P0、P90、P180、P270が入力される。監視ユニット200は、様々な位置信号P0、P90、P180、P270から、位置に応じた少なくとも2つの状態データワードZ1、Z2、Z3、Z4を生成することができる信号結合ユニット210と、状態データワードZ1、Z2、Z3、Z4が送信される評価ユニット220からなり、評価ユニット220では状態データワードZ1、Z2、Z3、Z4の比較によって無効の状態を確定することができ、無効の状態が確定された場合にエラー信号Fを生成することができる。
(もっと読む)
振幅変調装置の異常診断装置
【課題】レゾルバ20の異常を検出できないおそれがあること。
【解決手段】回転子10aの回転角度θの情報を含む一対の検出信号(A相被変調波Sa,B相被変調波Sb)は、2次側コイル24,26の電圧を差動増幅回路30,32に入力した出力信号として生成される。差動増幅回路30,32は、2次側コイル24,26との接続が途絶えると、出力信号を固定値とする。A/D変換器34,36は、A相被変調波Sa,B相被変調波Sbを、励磁信号Scの周期「2π/ω」とは相違するサンプリング周期Tでサンプリングする。サンプリング信号SA,SBの変動量に基づき異常の有無を診断する。
(もっと読む)
1 - 20 / 122
[ Back to top ]