
Fターム[2F077UU00]の内容
感知要素の出力の伝達及び変換 (32,270) | 特性補償又は雑音除去のための処理又は手段 (837)
Fターム[2F077UU00]の下位に属するFターム
電磁気的手段による特性補償 (345)
機械的手段による補償 (80)
信号の位相調整 (76)
信号の振幅調整、振幅変動の補償 (122)
雑音又はノイズの処理 (205)
Fターム[2F077UU00]に分類される特許
1 - 9 / 9
回転角度検出装置の初期設定方法

【課題】初期設定作業の簡素化を図りつつ、しかも当該作業精度に依存することなく検出誤差を低減することができる回転角度検出装置の初期設定方法を提供する。
【解決手段】初期設定時には、まず主動歯車が正方向へ任意の角度だけ回転される。このときサンプリングされる第1及び第2の従動歯車の回転角度αn,βnと、これらに基づき算出される主動歯車の仮回転角度θLから逆算される第1及び第2の従動歯車の回転角度αL,βLとの関係に基づき、2つの回帰直線Y1,Y2が求められる。同様にして、主動歯車が逆方向へ任意の角度だけ回転されたときの2つの回帰直線Y3,Y4が求められる。つぎに、各回帰直線Y1〜Y4と、サンプリングされる第1及び第2の従動歯車の各回転角度αn,βnとの差分の平均値が、実際にサンプリングされる第1及び第2の従動歯車の回転角度に加算される補正データとして初期設定される。
(もっと読む)
静電容量センサ

【課題】電極のずれにより生じる誤差を修正可能な静電容量センサを提供すること。
【解決手段】可動電極12と第1の固定電極11A及び第2の固定電極11Bとの間に蓄積された静電容量を検出する静電容量センサ100において、固定電極14と第1の固定電極及び固定電極と第2の固定電極の間のそれぞれの静電容量の絶対値を検出する検出手段と、前記静電容量の絶対値の逆数に比例した値を感度にかけることにより、電極のずれにより変動した感度を補正する補正手段30と、を有することを特徴とする。
(もっと読む)
エンコーダの信号処理回路
【課題】A相とB相の正弦波信号に補正しきれない誤差が生じても、容易な演算処理で誤差の影響を低減できる位置検出精度が高いエンコーダの信号処理回路を提供する。
【解決手段】合成角度変換手段2は、正弦波信号A0、正弦波信号B0、反転信号A1および反転信号B1の交点から合成角度信号AB0を生成し、分配係数変換手段4は、合成角度信号AB0から分配係数KA1と分配係数KB1を求める。それぞれの分配係数KA1(分配係数KB1)と、正弦波信号A0(正弦波信号B0)を逆三角関数変換によって得られる角度データA2(角度データB2)を乗算する。乗算データA3と乗算データB3を合成手段6にそれぞれ入力し、平均処理することで位置データθ1を生成する。
(もっと読む)
エンコーダ
【課題】受光素子が発生する信号のうちエンコーダ信号に寄与しない直流成分が比較的大きいエンコーダにおいても、低電圧で利用したい場合や、所望の変位検出精度を実現したい場合の両者に対応することができるようにすること。
【解決手段】所定周期のパターンが形成されたエンコーダスケール1とエンコーダヘッド2との相対変移を検出するエンコーダにおいて、上記エンコーダヘッド2は、上記エンコーダの出力が1相以上の周期性を有するエンコーダ信号であるときに、上記エンコーダ信号の振幅中心に設定する基準電圧を発生する基準電圧発生回路24と、上記基準電圧発生回路24で発生した基準電圧を変更する基準電圧可変手段25と、を備える。
(もっと読む)
位置検出装置および位置決め装置
【課題】広い範囲で線形性を有する出力が得られる位置検出装置を提供する。
【解決手段】可動方向に並んでN極3とS極4とに着磁された可動部材2と、可動部材2に対向して、可動方向に並んで配設され、それぞれ、磁界の変化を検出する2つの磁界検出素子5とを備える位置検出装置において、2つの磁界検出素子5の検出信号をA,Bとして、A≧0、且つ、A+B≧0のときは、(A−B)/(A+B)+2、A<0、且つ、B≧0のときは、(A+B)/(B−A)、B<0、且つ、A+B<0のときは、(A−B)/(A+B)−2の演算を行う。
(もっと読む)
回転角度検出装置および検出装置付き軸受
【課題】 時間遅れによる誤差のない正確な回転角度検出が可能な回転角度検出装置、およびこの回転角度検出装置を組み込んだ検出装置付き軸受を提供する。
【解決手段】 固定部材に対して回転自在な回転軸の軸端に、一対の磁極が形成された磁石を配置する。この磁石と軸方向に対向して前記固定部材に大規模集積回路からなる磁気センサを設け、この磁気センサの出力から前記回転軸の回転角度を検出する角度算出手段7を設ける。さらに、前記角度算出手段7で検出した回転角度の時間変化から回転速度を算出する回転速度算出手段11と、この回転速度算出手段11で算出した回転速度によって、前記磁気センサによる磁界の検出から前記角度算出手段7で回転角度を出力するまでの回転角度の時間遅れを補正する角度時間遅れ補正手段13を設ける。
(もっと読む)
エンコーダの信号処理回路
【課題】偏心誤差を除去するために回転軸の両側に2つの検出部を設けたエンコーダにおいて、それぞれの検出部の出力から計算される角度値の差が180°となるように検出部が取り付けられても平均化演算に支障が出ないようにすることによって、検出部の取り付けを容易にする。
【解決手段】電源ON後の初期処理において、それぞれの検出部14,16から出力される信号から計算される角度値θ1,θ2の差分Δθを初期値30として記憶する。この初期差分Δθによりθ1を補正して(32)、補正後のθ3とθ2の間で平均化処理34を行なって位置データθを出力する。
(もっと読む)
回転角検出装置の回転角補正方法
【課題】自動車の車体制御システムなどに用いられる多回転のハンドル回転角検出装置において、機械誤差、電気誤差、磁気誤差をより少ない補正データで補正する高精度な回転角検出装置の回転角補正方法を提供する。
【解決手段】被検軸1を回転させるモータ9と、このモータ9の回転角を制御するモータコントローラ14と、このモータ9の回転角を検出するエンコーダ10とを用いて、モータ9により実際に回転させた被検軸1の回転角と第1および第2の回転角検出部3,7により求めた被検軸1の算出回転角との差を補正角として不揮発性メモリ11に記憶し、この補正角でもって被検軸1の算出回転角を補正するようにしたものである。
(もっと読む)
可変リラクタンス位置センサ
本発明は、ターゲット(1)の位置変化を決定するための可変リラクタンスアナログ位置装置に関し、強磁性材料と少なくとも一つの磁石(2)とからなるターゲット(1)を含み、前記ターゲットと磁石とが双方の間にギャップ(8)を画定し、装置が、さらに、磁石(2)に対するターゲット(1)の相対移動によりギャップに生じる誘導変化を検知する磁気感知素子(3)を含む。本発明は、磁石(2)が、ギャップの縁を画定する磁石の前面(9)に対してほぼ垂直な方向に磁化され、前記磁石が、この磁石の前記前面(9)に開かれている空洞(10)を有し、磁気感知素子(3)が、前記空洞(10)に収容され、ターゲット(1)は、このターゲット(1)の前記位置に応じた誘導変化が予め決められた機能に対応するように所定の幾何学的構成を有することを特徴とする。本発明は、また、前記ターゲット(1)を構成する方法に関する。 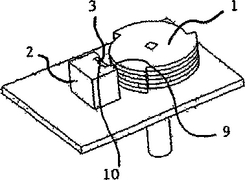 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]