
Fターム[2F078CB05]の内容
器械の細部 (1,105) | 検出、駆動 (454) | 検出態様及び検出手段 (147) | 光、レーザ、エンコーダにより検出 (54)
Fターム[2F078CB05]に分類される特許
1 - 20 / 54
ステージ装置及び処理装置
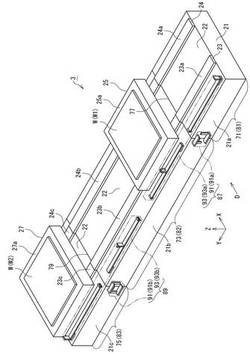
【課題】従来のステージ装置では、ワークに対する処理精度を維持することが困難である。
【解決手段】ワークWを支持するワークテーブル25と、ワークテーブル25の移動を案内する第1ガイド部81と、第1ガイド部81につなぎ合わされており、ワークテーブル25の移動経路を延長する第2ガイド部82と、つなぎ合わされた第1ガイド部81と第2ガイド部82との間の精度を監視する監視装置87と、を有する、ことを特徴とするステージ装置。
(もっと読む)
載物台用送り機構

【課題】回転軸と推進構造部との接触圧力について制約がなくステージの大型化に対応可能であり、さらに粗動移動時においてステージあるいは推進構造部と他の構成部材との衝突を回避することができる載物台用送り機構を提供すること。
【解決手段】物体を載置する載物台と、回動によって前記載物台を駆動する駆動軸と、前記駆動軸を加圧保持して前記駆動軸の回動を前記載物台の駆動に変換する変換部と、前記変換部の前記駆動軸に対する加圧保持および加圧解除を行うアクチュエータと、前記アクチュエータを制御する制御部とを備えたことを特徴とする載物台用送り機構。
(もっと読む)
位置決め装置
【課題】位置決め機構により二次元平面内で位置決めされる位置決め対象物の、装置内での可動範囲を拡張できる位置決め装置を提供する。
【解決手段】墨出し装置10(位置決め装置)は、スタンプ部14(位置決め対象物)をx´−y´平面(二次元平面)内で位置決めするx−y調整機構30と、x−y調整機構30を、x´−y´平面と直交する回転支軸42の周りに回転させる回転角調整機構40と、を備えることを特徴とする。この墨出し装置10において、回転支軸42は、x´−y´平面の中心からずれて配されている。
(もっと読む)
アライメントステージ及び処理装置
【課題】駆動効率及び動作速度を確保できるとともにコンパクトに構成でき、しかも、製造コストを低減することのできるアライメントステージ及び処理装置を提供する。
【解決手段】本発明のアライメントステージ10は、第1の回転駆動手段と、第2の回転駆動手段と、第1の回転軸線11xを中心に回転可能に軸支されるとともに第1の回転駆動手段により回転駆動される第1の回転体11と、第1の回転体に対して第1の回転軸線と平行な第2の回転軸線12xを中心に回転可能に軸支されるとともに第2の回転駆動手段により回転駆動される第2の回転体12と、第2の回転体と一体に構成され、或いは、第2の回転体に固定若しくは連結された移動ステージ13と、を具備し、第2の回転駆動手段は、第1の回転軸線を中心に回転する第2の回転駆動軸4と、第2の回転駆動軸と第2の回転体との間に接続された第2の回転伝達機構9と、を有することを特徴とする。
(もっと読む)
位置決め装置の設計方法、位置決め装置の製造方法、位置決め装置、及び露光装置
【課題】位置決めを高精度に実行することができる位置決め装置の設計方法、位置決め装置の製造方法、位置決め装置、及び露光装置を提供する。
【解決手段】第1方向に移動可能なXステージ100と、結合部により該Xステージ100に結合され、該Xステージ100に対して第2方向に移動可能なYステージ200と、Xステージ100を第1方向に移動させるモータ(不図示)と、を備える位置決め装置において、モータ(不図示)がXステージ100を移動させる力と、第1方向における該Yステージ200の位置と、の関係を表す伝達関数に基づく、剛体モードと、1次共振と、2次共振と、の関係に基づいて、位置決め装置のXステージ100及びYステージ200の少なくとも一方の作製上の諸元が定められる。
(もっと読む)
ステージ装置、露光装置及び露光方法
【課題】ステージを移動面に沿って移動させる。
【解決手段】移動面を移動するステージに対して用力を供給する用力供給装置(155)が、第1軸部(232)、第1支持部(234,235)、第2軸部(238)及び第2支持部(239)を備え、第1軸部は第1支持部により第1軸の方向及び第1軸回りに移動可能に支持され、第2軸部は第2支持部により第2軸の方向及び第2軸回りに移動可能に支持されている。このように用力供給装置を少なくとも4自由度を有する機構とすることにより、ステージが2次元面内で、第1、第2軸方向、及び各軸回りの回転方向に移動しても、用力供給装置がその移動の妨げとなることがないので、流体の供給にチューブなどの配管を用いる場合と比較して、チューブを引きずることによるステージの位置制御性の低下を完全に回避することができる。
(もっと読む)
XYテーブルの制御方法およびXYテーブル
【課題】本発明は、セットテーブルの位置決めを精度良く且つ容易に行うことができるXYテーブルの制御方法を提供することを課題としている。
【解決手段】仮想マトリクスにおける各点を目標座標点として移動させて、セットテーブル2の各実移動座標点を有する実座標データを取得する実座標取得工程と、取得した実座標データに基づいて、X軸移動機構3およびY軸移動機構5に対する移動指令における目標座標点を補正する座標補正工程と、を有する。
(もっと読む)
XYステージ
【課題】プラテン上を2次元移動するスライダの位置を制御するXYステージにおいて、光軸調整に高い精度が要求される反射型センサを用いることなく、スライダの接触・衝突を防止できるようにする。
【解決手段】プラテン上の平面を2次元移動するスライダの位置を制御するXYステージであって、スライダに、他物体が前記平面上の所定の基準距離内に存在していることを検出する超音波センサが配置され、超音波センサが、基準距離内に他物体が存在していることを検出すると、超音波センサが配置されているスライダの移動を停止させる制御部を備える。
(もっと読む)
位置決め装置、製造装置及び検査装置
【課題】浮揚手段から噴出される空気が、スライダ部上方のセンサに悪影響を及ぼすことを抑制し、装置全体の性能低下を低減する。
【解決手段】この位置決め装置には、対象物が載置されるスライダ部と、スライダ部を水平移動させるためのプラテンと、スライダ部をプラテンから浮揚させる浮揚手段と、浮揚手段により浮揚したスライダ部を水平移動させる平面モータと、浮揚手段に空気を供給する空気供給部と、空気供給部から供給された空気を冷却する冷却部と、浮揚手段から噴出された空気の温度を検出する温度センサと、温度センサの検出結果に基づき冷却部を制御する温度制御部とを備えている。温度制御部は、浮揚手段から噴出する空気の温度が、温度センサの検出結果よりも低くなるように、冷却部を制御する。
(もっと読む)
超音波電動ステージ
【課題】操作性及びデザイン性を向上させると共に、超音波モータ駆動時に発生する磨耗粉による変位センサの誤作動を防止する。
【解決手段】超音波電動ステージは、ベース部1と、Yテーブル2と、Xテーブル3と、Yテーブル2を駆動するリニア式超音波モータ6と、Yテーブル2の移動量を検出する光学式リニアセンサ7と、Xテーブル3を駆動するリニア式超音波モータ4と、Xテーブル3の移動量を検出する光学式リニアセンサ5とを備える。ここで、リニア式超音波モータ6、光学式リニアセンサ7、リニア式超音波モータ4、及び光学式リニアセンサ5は、Xテーブル3の上面よりも上方に迫り出すことなく、当該超音波電動ステージの前面以外の位置であって、且つ、リニア式超音波モータ6及び又は4の駆動時に発生する磨耗粉が光学式リニアセンサ7及び5に悪影響を及ぼさない位置に配置される。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
位置決め装置
【課題】安価な構成により高精度でかつ短時間に原点復帰を行うことができる位置決め装置の実現を実現する。
【解決手段】X軸方向およびY軸方向に位置制御されるスライダ200,300と、このスライダ200,300と対向する面に磁極の歯が形成されてスライダ200,300と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ200,300に設けられ、スライダ200,300のプラテン10に対する位置を検出するX軸レゾルバおよびY軸レゾルバと、
X軸レゾルバおよびY軸レゾルバで得られる位置検出信号に基づいて、スライダ200,300をプラテン10上に設定された原点位置にサーボ制御する原点復帰制御部402と、
を備えることを特徴とする。
(もっと読む)
ステージ装置
【課題】半導体製造分野で用いられるSEMの試料ステージで要求されるような高いレベルでの位置決め精度やドリフトの低減を簡易な構造で可能とするステージ装置の提供。
【解決手段】ステージ装置は、ベースに支持されて移動するテーブルを備えるとともに、そのテーブルに組付けられる制動機構17xを備えている。制動機構17xは、押圧作動力を発生させる押圧アクチェータ41、ベースに設けられた制動面19xを押圧作動力に応じた押圧力で押圧する押圧部材43、および押圧部材に押圧作動力を伝達する動力伝達部材42を有し、押圧部材は、押圧力を制動面の法線Pに対し傾けて作用させるようにされ、それにより押圧力から法線方向の分力として制動力52を得るとともに、制動面内の分力として推力53を得るようにされ、そして推力により、当該推力に応じた移動距離についてテーブルに移動を生じさせることで高精度な位置決めをなさせるとともに、制動力によりテーブルの停止状態を安定化させるようにされている。
(もっと読む)
位置決め装置
【課題】可動プレートのXY並進方向の可動範囲から独立してθ方向の可動範囲を制限することを可能とする位置決め装置を提供する。
【解決手段】XYθステージ1は、可動プレート3に載置される半導体ウエハWのXYθ方向の位置決めを行う装置であり、前記可動プレート3を、XYθ方向に駆動するアクチュエータ41x,43x,41y〜44yと、θ方向の可動範囲を制限する回転制限部20と、を備えている。前記回転制限部20は、前記可動プレート3に対するX方向の並進移動とY方向の並進移動とが許容され、かつθ方向の回転移動が規制されるように前記可動プレート3にリンクされた円筒部材25と、前記基台フレーム5に対して固定され、前記円筒部材25の内壁面との間に間隙をもって円筒部材25に挿通された丸棒部材27と、を有している。
(もっと読む)
ステージ装置及びステージ装置におけるステージの位置決め制御方法
【課題】
可動テーブルの重量を増加させることなく、ステージ停止時における十分な制動力を発生するブレーキ機構を有するステージ装置を構成する。
【解決手段】
ステージ機構1は、Xベース120の上に固定されるX方向の案内機構としてのXガイド121と、これに拘束されてX方向に移動可能なXテーブル122と、これに可動部を固定されたXアクチュエータ123と、Xベース120の上に固定されたXテーブル122の制動機構であるXブレーキ124などから構成される。制御装置2は、ステージ停止時にXブレーキ124をXテーブル122の下面に押し付けて制動力を発生させ、ステージ停止後にはXアクチュエータをサーボ制御をオフにする位置決め制御を行う。
(もっと読む)
位置決定用測定装置のXYテーブル
XYテーブルは、固定基準部分(B)と、該基準部分(B)に対して相対的に第1の方向(Y)に移動可能に保持されている中間部分(F)と、該中間部分(F)に対して相対的に第2の方向(X)に移動可能に保持されている物体(O)とを含む。この場合、処理されるべき部品(W)が物体(O)又は基準部分(B)上に配置される。さらに、第1の方向(Y)に対して、基準部分(B)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M1、M2)と、第2の方向(X)に対して、物体(O)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M3、M4)とを含む。これにより、部品(W)又は物体(O)におけるツール中心点(TCP)の位置(Xo、Yo)が測定可能である。1Dプラスエンコーダ(M1、M2、M3、M4)は、第1及び第2(Y、X)の方向に広がる平面であってツール中心点(TCP)を含む平面内へのそれらの投影が、XYテーブルの全走行領域内で部品(W)の外側に存在するように配置されている。これにより、アッベ(Abbe)条件が満足されるので、簡単な1Dプラスエンコーダを用いて物体(O)におけるツール中心点(TCP)の正確な測定を可能にする。 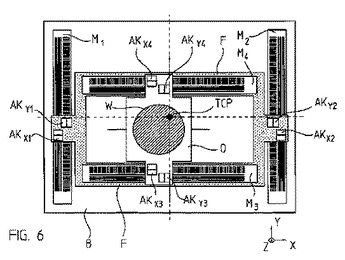 (もっと読む)
(もっと読む)
ステージの昇降装置
【課題】ステージにかかる偏荷重による位置ずれを補正できるステージの昇降装置を実現する。
【解決手段】ステージをZ軸方向に移動させる昇降機構と、位置指令値に基づいてステージをX軸方向及びY軸方向に位置決めする位置決め部とを有するステージの昇降装置において、ステージに加わる偏荷重の大きさと、この偏荷重がステージに加わることによって生じたステージのX軸方向及びY軸方向の位置ずれ量とを対応させた補正テーブルを格納し、この補正テーブルは補正テーブル用メモリと、荷重センサと、ステージのX軸方向及びY軸方向の位置を検出する位置センサと、位置指令値に基づいて偏荷重が加わっているステージの位置を求め、位置に応じた補正テーブルを選択し、荷重センサの検出荷重から位置ずれ量を読み出すずれ量算出手段と、このずれ量算出手段で読み出した位置ずれ量で補正した位置指令値と、荷重による位置ずれを補正する位置制御部と、を有する。
(もっと読む)
XYステージ
【課題】バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージを実現する。
【解決手段】プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離づつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備える。
(もっと読む)
精密微動位置決め装置およびそれを備えた微動位置決めステージ、露光装置、検査装置
【課題】弾性体で可動ステージの重量を支持し、アクチュエータで可動ステージを駆動する精密微動位置決め装置において、装置を小型にし多自由度化する。
【解決手段】固定ベースと、固定ベースの上に取り付けられた電磁アクチュエータの固定子と、固定子と一定の空隙を介して対向し、固定子に対して上下に移動可能な電磁アクチュエータの可動子と、固定ベースと可動ベースとの相対的な変位を検知する変位センサが収納され、固定ベースの上に下端が取り付けられた弾性支持機構と、弾性支持機構の上端と電磁アクチュエータの可動子の上端とが固定された可動ベースと、を備えた精密微動位置決め装置とした。
(もっと読む)
ステージ装置
【課題】一の水平方向に移動可能な第1のテーブル上にて支持された第2のテーブルの振動を制振する。
【解決手段】装置1は、X方向に移動可能なXY軸テーブル2と、XY軸テーブル2上にて支持部3で支持されたZ軸テーブル4と、X方向に互いに離れて配置されZ軸テーブル4のZ方向速度を検出する一対のスケール10a,10bと、X方向に互いに離れて配置されZ軸テーブル4を鉛直方向に駆動する一対のモータ11a,11bと、検出されたZ方向速度に基づいてモータ11a,11bの駆動を制御するコントローラ12と、を備え、スケール10a,10bでZ方向速度を検出することでZ軸テーブル4のピッチング振動挙動を求め、モータ11a,11bを駆動し、ピッチング振動が相殺されるようにZ軸テーブル4をピッチング方向Pに回転する。
(もっと読む)
1 - 20 / 54
[ Back to top ]