
Fターム[2F105AA06]の内容
Fターム[2F105AA06]に分類される特許
1 - 20 / 236
角速度センサ
角速度センサ
移動経路推定システム、移動経路推定装置及び移動経路推定方法
ジャイロセンサーオフセット自動補正回路、ジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法
【課題】本発明は、ジャイロセンサーオフセット自動補正回路、ジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法に関する。
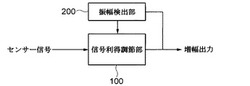
【解決手段】本発明の一実施例によると、各センサー電極の出力信号を受けて増幅し、可変抵抗調節によって各出力信号に含まれた駆動信号成分によるオフセットの少なくとも一部を除去する信号利得調節部と、信号利得調節部の出力信号を検出し、信号利得調節部の出力信号が予め設定された範囲内に維持するように可変抵抗を調節する振幅検出部と、を含んでなるジャイロセンサーオフセット自動補正回路が提案される。また、それを含むジャイロセンサーシステム及びジャイロセンサーオフセット自動補正方法が提案される。
(もっと読む)
姿勢角演算装置、姿勢角演算方法、及びプログラム

【課題】高速で姿勢角度を算出すること。
【解決手段】姿勢角演算装置は、移動体の状態量を検出する状態検出手段と、状態検出手段により検出された移動体の状態量に基づいて、移動体の姿勢を示す四元数を算出する四元数算出手段と、四元数算出手段により算出された四元数におけるヨー軸成分をキャンセルして四元数の修正を行った修正四元数(Qmod=w+xi+yj+zk)を算出する修正手段と、修正手段により算出された修正四元数に基づいて、近似式を用いて移動体のロール角α及びピッチ角βを高速に算出する姿勢角計算手段と、を備えている。
(もっと読む)
角速度センサ
【課題】角速度センサの有するクロック周波数とマスタコンピュータの持つクロック周波数とが異なる場合においても、正確な出力信号を出力することが可能な角速度センサを提供することを目的とするものである。
【解決手段】INT出力制御回路76から出力されるデータ更新信号に同期させて、角速度信号からなる応答信号を通信制御回路63における出力端子66からマスタコンピュータ68における入力端子71に入力する構成としたものである。
(もっと読む)
慣性力センサ
【課題】本発明は、外乱振動を抑制して検出精度を損なわずに小型化した慣性力センサを提供することを目的とするものである。
【解決手段】本発明の慣性力センサは、角速度検出素子61と、この角速度検出素子61を上面に中空保持する載置部63とこの載置部63に配線パターン64を介して接続された外方部65とからなる防振手段62と、角速度検出素子61からの出力信号を処理するIC67と、角速度検出素子61、防振手段62およびIC67を収納するパッケージ68とを備え、パッケージ68の内底面に加速度検出手段66を設けたものである。
(もっと読む)
伝送モードRFOGおよびRFOGで回転を検出する方法
【課題】共振器の望ましくない偏光状態に整合された入力光、または共振器の望ましくない空間モードに整合された入力光からの干渉を最小限に抑えることにより、より正確な回転速度測定値を有する光ファイバジャイロを提供する。
【解決手段】光ビームを各逆伝播方向に循環させるリング共振器は、中空コアおよび第1および第2の端部を有する光ファイバコイル24と、入力光ビームを受け、入力光ビームの一部をリング共振器の逆伝播方向に向けるように構成された第1の光学素子40と、第1の光学素子と共に循環光ビームの大部分をリング共振器の逆伝播方向に向け、循環光ビームの伝送モード成分を端部の一方で導出するように構成された第2の光学素子42とを備える。入力光ビームの部分は、第1および第2の端部の一方に進入し、循環光ビームは入力光ビームに基づく。伝送モード成分は、リング共振器の逆伝播方向の共振ピークを示す。
(もっと読む)
物理量検出素子、物理量検出装置、および電子機器
【課題】複数の振動腕を音響結合させて、1つの発振回路でそれぞれの振動腕の振動を励起でき、物理量検出の感度向上が図れる物理量検出素子を提供する。
【解決手段】ジャイロ素子(物理量検出素子)1は、基部2からX軸に沿って互いに反対方向へそれぞれ延出した連結部31と、連結部31の付け根6からY軸に沿った方向またはX軸に対して斜め方向へ延出し駆動信号電極7を有して駆動振動をする第1駆動振動腕41乃至第8駆動振動腕48と、基部2からX軸に対して斜め方向へ延出し検出信号電極8を有する第1検出振動腕51乃至第4検出振動腕54と、を備え、第5駆動振動腕45と第1駆動振動腕41とが逆位相で振動し、第6駆動振動腕46と第2駆動振動腕42、第7駆動振動腕47と第3駆動振動腕43、および第8駆動振動腕48と第4駆動振動腕44、のそれぞれも逆位相で振動し、S字振動が可能である、ことを特徴とする。
(もっと読む)
物理量検出素子、物理量検出装置、および電子機器
【課題】複数の振動腕を音響結合させて、1つの発振回路でそれぞれの振動腕の振動を励起でき、物理量検出の感度向上が図れる物理量検出素子を提供する。
【解決手段】ジャイロ素子(物理量検出素子)1は、基部2からX軸に沿って互いに反対方向へそれぞれ延出した連結部31と、連結部31の付け根6からY軸に沿った方向またはX軸に対して斜め方向へ延出し駆動信号電極7を有して駆動振動をする第1駆動振動腕41乃至第8駆動振動腕48と、基部2からX軸に対して斜め方向へ延出し検出信号電極8を有する第1検出振動腕51乃至第4検出振動腕54と、を有し、第1駆動振動腕乃至第4駆動振動腕におけるZ軸方向の第1面外振動の周波数と、第5駆動振動腕乃至第8駆動振動腕におけるZ軸方向の第2面外振動の周波数と、の差が、駆動振動の周波数と第2面外振動の周波数との差である第2離調周波数よりも大きい、ことを特徴とする。
(もっと読む)
物理量検出素子、物理量検出装置および電子機器
【課題】複数の振動腕を音響結合させて、1つの発振回路でそれぞれの振動腕の振動を励起でき、物理量検出の感度向上が図れる物理量検出素子を提供する。
【解決手段】ジャイロ素子(物理量検出素子)1は、基部2と、基部2からX軸に沿って互いに反対方向へそれぞれ延出した第1連結部31および第2連結部32と、駆動信号電極7を有する駆動振動腕4と、検出信号電極8を有する検出振動腕5と、を備え、駆動振動腕4は、第1連結部31の付け根6aまたは第2連結部32の付け根6bからY軸に沿った方向またはX軸に対して斜め方向へ延出した、第1駆動振動腕41乃至第8駆動振動腕48を有し、検出振動腕5は、基部2からY軸に沿った方向またはX軸に対して斜め方向へ延出した、第1検出振動腕51乃至第8検出振動腕58を有している、ことを特徴とする。
(もっと読む)
物理量検出センサーおよび電子機器
【課題】検出の精度を高めることができる物理量検出センサーを提供する。
【解決手段】自励発振回路26は、振動腕21a、21bに固定される駆動電極22a、22bを通じて、振動腕21a、21bの自励発振を引き起こす駆動信号を供給する。物理量の作用に応じて振動腕21a、21bに対して相対的に変位する相対変位片上には検出電極25a、25bが配置される。検出電極25a、25bは、駆動電極22aとの間で静電結合を生じる距離で駆動電極22aから離れる。検出回路27は、駆動信号に基づき、検出電極25a、25bからの静電容量信号を駆動信号検出する。
(もっと読む)
姿勢推定装置、姿勢推定方法、姿勢推定プログラム
【課題】姿勢角速度バイアスを推定する計算の効率を向上する技術を提供する。
【解決手段】姿勢推定部8は、傾斜角センサの計測結果に基づいて倒立二輪車本体の姿勢角度の四元数表現である第1姿勢角度四元数αmeasuredを生成する第1姿勢角度四元数生成部20と、ジャイロセンサの計測結果に基づいて倒立二輪車本体の姿勢角度の四元数表現である第2姿勢角度四元数αpredictを予測して生成する第2姿勢角度四元数生成部21と、カルマンフィルタ係数K1を生成するフィルタ係数生成部22と、下記式(9)により姿勢角速度バイアス四元数bnを推定する姿勢角速度バイアス四元数推定部26と、を備える。ただし、bn-1は、前回の姿勢角速度バイアス四元数である。 (もっと読む)
(もっと読む)
角速度センサ
【課題】本発明は、電荷増幅器からの出力信号にどのようなノイズ成分がのっている場合でも、確実にノイズ成分を除去することができる角速度センサを提供することを目的とするものである。
【解決手段】本発明の角速度センサは、検出回路37における第1の電荷増幅器38と第2の電荷増幅器39とから出力される出力信号の差値を増幅する差動増幅器40にコンデンサ45および抵抗46を並列に接続したローパスフィルタ47を設け、出力信号からノイズ成分を除去する構成としたものである。
(もっと読む)
物理量検出素子、物理量検出装置および電子機器
【課題】X軸、Y軸およびZ軸の各軸まわりの回転検出ができ、1つの発振回路で振動を励起することが可能な物理量検出素子を提供する。
【解決手段】物理量検出素子1は、基部2と、基部2からX軸に沿って互いに反対方向へそれぞれ延出した第1連結部3aおよび第2連結部3bと、第1連結部3aまたは第2連結部3bからY軸に沿って互いに反対方向へそれぞれ延出した一対の第1駆動振動腕4aおよび第2駆動振動腕4b、並びに一対の第3駆動振動腕4cおよび第4駆動振動腕4dと、第1連結部3aから斜めに延出した第1駆動検出振動腕5aおよび第2駆動検出振動腕5bと、第2連結部3bから斜めに延出した第3駆動検出振動腕5cおよび第4駆動検出振動腕5dと、基部2からY軸に沿って互いに反対方向へそれぞれ延出した第1検出振動腕6aおよび第2検出振動腕6bと、を備えている、ことを特徴とする。
(もっと読む)
センサーモジュールおよび電子機器
【課題】体積の増加を伴わずに従来に比べて電子部品の実装面積を増加させることができるセンサーモジュールを提供する。
【解決手段】センサーモジュールは、脚体18、19および脚体18、19の一端に接続された天井体21を含むマウント部材16と、センサー素子32、33を含む電子部品とを備える。マウント部材16には、相互に非平行な垂線ベクトルを有する固定面が複数設けられ、固定面35、36の少なくとも2つにはセンサー素子32、33が備えられ、かつ、脚体18、19と天井体21とにより区画されるキャビティ25内に電子部品の少なくとも1つが配置される。
(もっと読む)
センサーデバイスおよび電子機器
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができるセンサーデバイスおよび電子機器を提供すること。
【解決手段】センサーデバイス1は、内側に固定面101、102を有する固定部材3と、固定部材3の固定面101、102に直接または間接的に固定された少なくとも1つの電子部品7とを有し、固定部材3が、電子部品7を収容するケーシング10の一部を構成する。また、固定面101、102は、互いに直交している。
(もっと読む)
電子デバイスおよび電子機器
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができる電子デバイスおよび電子機器を提供すること。
【解決手段】電子デバイス1は、実装基板2と、台座3と、蓋部材8とを有している。また、台座3は、実装基板2に含まれる第1のリジッド基板21を支持する第1の支持部32と、実装基板2に含まれる第2のリジッド基板22をその厚さ方向が第1のリジッド基板21の厚さ方向に対して直交するように支持する第2の支持部33とを有している。また、蓋部材8は、その内側に実装基板2に含まれる第3のリジッド基板23を支持する第3の支持部82を有している。
(もっと読む)
回路基板、センサーモジュールおよび電子機器
【課題】小型化を図りつつ、優れた信頼性を発揮するこのとのできる回路基板、センサーモジュールおよび電子機器を提供すること。
【解決手段】センサーモジュール1は、下面42に形成されたアナログ回路部421および上面41に形成されたデジタル回路部411を有する実装基板4と、実装基板4の下面42側に設けられた2つの角速度センサー712、713が実装基板4に対して縦置きに設けられている回路基板2と、実装基板4の下面42と対向するように配置され、回路基板2を支持する台座3とを有する。
(もっと読む)
ジャイロセンサ
【課題】小型かつ簡単な構成でありながら、回転方向を識別することができるとともに微小な回転角速度を高精度に計測することのできるジャイロセンサを提供する。
【解決手段】LD1からのレーザー光は、分岐部である偏波スプリッタ4並びに偏波フィルタ5および6により、偏光状態が互いに異なる第1の光L1と第2の光L2に分岐され、環状ファイバ7を互いに逆方向に通過する。環状ファイバ7は、少なくとも一部に偏光状態に応じて通過する光の速度が異なる媒質を含む。環状ファイバ7を通過した第1の光L1と第2の光L2との干渉光を、光電変換部8により検出する。
(もっと読む)
1 - 20 / 236
[ Back to top ]