
Fターム[2F105BB20]の内容
Fターム[2F105BB20]に分類される特許
1 - 20 / 204
容量式センサ装置
角速度検出装置用回路、角速度検出装置及び故障判定システム
【課題】振動子の故障検出精度を高めた角速度検出回路及び角速度検出装置を提供する。
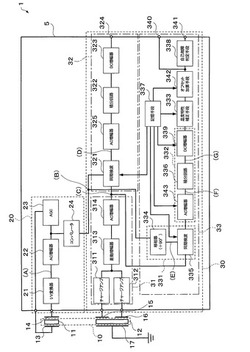
【解決手段】駆動信号に基づいて励振振動する振動子10に接続され、角速度を検出する角速度検出回路5であって、振動子10から、コリオリの力に基づく角速度成分と、励振振動に基づく自己振動成分とを含む検出信号が入力され、検出信号から自己振動成分を抽出する自己振動成分抽出手段331と、自己振動成分抽出手段331の出力信号を積分する積分手段336を含む直流変換手段332と、直流変換手段332の出力信号にオフセット値を加えるオフセット加算手段342とを含む。
(もっと読む)
ジャイロ校正のための2回転軸直交ダブルターンテーブル

【課題】本発明は、第1テーブル上に、この第1テーブルの垂直方向回転軸とは直交する水平方向回転軸を有する第2テーブルを設けたダブルターンテーブルを得ることを目的とする。
【解決手段】本発明によるジャイロ校正のための2回転軸直交ダブルターンテーブルは、基台(1A)に設けられた垂直方向回転軸(2)に設けられた第1テーブル(1)と、前記第1テーブル(1)上に設けられ、前記垂直方向回転軸(2)に対して直交する水平方向回転軸(10)に設けられた第2テーブル(11)と、を備え、前記各テーブル(1,11)の各テーブル面(1B,11B)は互いに直交している構成である。
(もっと読む)
角速度検出装置用回路、角度検出装置及び故障判定システム
【課題】振動子の故障検出精度を高めた角速度検出回路、角速度検出装置及び故障判定システムを提供する。
【解決手段】駆動信号に基づいて励振振動する振動子10に接続され、角速度を検出する角速度検出回路5であって、振動子10から、コリオリの力に基づく角速度成分と、励振振動に基づく自己振動成分とを含む検出信号が入力され、検出信号から自己振動成分を抽出する自己振動成分抽出手段331と、自己振動成分抽出手段331の出力信号を積分する積分手段336を含む直流変換手段332と、直流変換手段332の出力信号の温度による変動を補正する温度特性補正手段333とを含む。
(もっと読む)
機械的に頑強なマイクロマシニングによるジャイロスコープのための三質量体連結振動の技術
【課題】電力消費が低下したマイクロマシニングによるジャイロスコープを提供する
【解決手段】基板と、第1方向x又はyに沿って振動するように構成された3つの質量体m1、m2及びm3とを備え、第1質量体m1は基板に機械的に連結され、第2質量体m2は、第1質量体m1及び基板に機械的に連結され、第3質量体m3は、第2質量体m2に機械的に連結され、各質量体m1、m2及びm3の重さ及びばね定数k1,k2、並びに、機械的連結k12,k23が、動作中に質量体m1及び質量体m3の共振周波数を充分に上回る周波数で質量体m2が振動するように選択される。質量体m2の共振周波数は、質量体m1又はm3の共振周波数より、少なくとも2倍、更には2.5倍大きくてもよい。
(もっと読む)
磁気式ジャイロ
【課題】回転角速度を短時間で算出できる磁気式ジャイロを提供する。
【解決手段】磁気式ジャイロ1は、3軸磁気センサ2と、メモリ3と、回転軸決定手段10と、回転角速度算出手段11と、回転角速度出力手段12とを備える。回転角速度算出手段11は、メモリ3に蓄積された磁気ベクトルのデータと時刻データとに基づいて、回転運動の回転角速度を算出する。回転角速度算出手段11は、3軸磁気センサ2によって検出した磁気ベクトルHと、ΔH(=H−H’)と、回転軸と磁気ベクトルHとの間の角度αを、下記数式
|ω|=|H×ΔH|/(|H|2・sinα・Δt)
に代入することにより、被測定体の回転角速度ベクトルωの絶対値|ω|を、回転角速度として算出する。
(もっと読む)
向上した始動中の速度推定のためのジャイロスコープの動的モータ振幅補償
【課題】電力供給後の始動段階において、速やかに正確な速度情報をもたらすことができるジャイロスコープ装置のシステムおよび方法を提供する。
【解決手段】始動中のジャイロスコープ110の動的モータ振幅補償のためのシステムは、始動中のジャイロスコープのモータ振幅成長のモデルに基づいて、アプリオリのモータ振幅信号122を生成するように構成されたアプリオリのモータ振幅モジュール120と、定常状態のスケール係数モジュール124と、アプリオリのモータ振幅信号および定常状態のスケール係数信号を受けるように構成された動的モータ振幅補償モジュール128とを含む。動的モータ振幅補償モジュールは、ジャイロスコープからの測定されたモータ振幅信号116、アプリオリのモータ振幅信号、を受け、始動段階の間に、検出された速度信号に適用される時変スケール係数130を出力する。
(もっと読む)
自己診断機能を有する角速度センサ
【課題】本発明は、音叉型振動子を発振回路を共用として自己診断を行うことにより簡略化及び小型化することを目的とする。
【解決手段】本発明による自己診断機能を有する角速度センサは、音叉型振動素子(1)に駆動電極(9)と検出電極(20)と自己診断用電極(6,7)を設け、各自己診断用電極(6,7)と駆動電極(9)を一対のスイッチ(SW1,SW2)を介して1個のみの発振回路(10)を共用として選択的にON/OFFすることにより、音叉型振動子(1)の各アーム部(2,3)を対称駆動又は非対称駆動とする構成である。
(もっと読む)
センサ装置
【課題】検出値に関する経年変化の影響を容易に認識し得るセンサ装置を提供する。
【解決手段】ジャイロセンサ20では、メモリ22には、装置の製造時に各検出条件に応じて角速度検出部23により検出され得る初期検出値が予め記憶される。そして、上記特性変化検査用情報設定処理を実行する制御部21により、角速度検出部23により検出される現角速度検出値とこの検出値の検出条件に対応する初期角速度検出値とが入出力インタフェース25を介して検査装置30に出力される。
(もっと読む)
センサーモジュール、センサーデバイス、センサーデバイスの製造方法及び電子機器
【課題】多軸に対応したセンサーモジュール及びそれを備えたセンサーデバイスの提供。
【解決手段】センサーモジュール1は、互いに直交する3つの支持面11,12,13を有する支持部材10と、能動面21側に接続端子22、外部接続端子23を有し、能動面21に沿った非能動面29側が支持部材10の各支持面11,12,13に取り付けられた3つのICチップ20と、基部31と基部31から延伸された各振動腕(32a,32bなど)と接続電極39とを有する3つの振動ジャイロ素子30と、ICチップ20の外部接続端子23と接続されたフレキシブル配線基板40,40aと、を備え、各振動ジャイロ素子30は、各ICチップ20の能動面21側に配置され、一方の主面30aが支持面11,12,13に沿うように、接続電極39が各ICチップ20の接続端子22に取り付けられ、フレキシブル配線基板40は、補強層43を有する。
(もっと読む)
高線形性信号処理増幅器
【課題】高線形性信号処理増幅器を提供する。
【解決手段】クランプポイント能動回路が提供される。クランプポイント能動回路は、少なくとも2つのレベル間で遷移する装置から出力を受信するように構成されたレート増幅器を含む。クランプポイント能動回路は、レート増幅器から出力を受信するように構成された少なくとも1つのスイッチ素子を有する。少なくとも1つのスイッチ素子は、レート増幅器の少なくとも1つのそれぞれのフィードバックループにある。少なくとも1つのスイッチ素子のスイッチングは、レート増幅器に、所望の動作範囲で高い線形性をもって増幅させ、所望の動作範囲の外にある遷移装置から受信された出力を一定レベルに固定させる。
(もっと読む)
角速度センサ
【課題】故障等を高精度に自己診断することができる角速度センサを提供する。
【解決手段】第一駆動腕と第二駆動腕とを有する音叉型の振動子と、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、角速度を検出する検出部と、を備える角速度センサであって、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行する。
(もっと読む)
センサーデバイス、モーションセンサー、電子機器
【課題】外部から加わる衝撃などの応力の緩和が可能な小型のセンサーデバイス、モーションセンサー、及び、これらを用いた電子機器を提供する。
【解決手段】センサーデバイス1は、基部21、基部21から延伸された検出用振動腕及び駆動用振動腕、外部接続端子29を有する振動ジャイロ素子20と、ICチップ10とを備えている。第1の電極11、及び、第1の電極11に配線16を介して電気的に接続されて能動面10a側の第1の電極11と平面視で重ならない位置に設けられた第2の電極17により構成された複数の電極部18と、能動面10aと第2の電極17との間に設けられた樹脂層としての応力緩和層15と、を有し、振動ジャイロ素子20が、外部接続端子29と第2の電極17との接合部材12を介した接続によってICチップ10に保持されている。第2の電極17は、第1の電極11から略同じ方向に同じ長さだけずらせて設けられている。
(もっと読む)
停止判定装置及び停止判定方法
【課題】車種などの違いによる停止判定のばらつきを抑制し、正確な停止判定を行う停止判定装置を提供することを目的とする。
【解決手段】移動体に備えられ、加速度を検出する加速度センサ及び/又は角速度を検出する角速度センサと、連続する所定期間毎に、該所定期間における加速度及び/又は角速度に基づく期間比較値を特定する制御部と、前記期間比較値を記憶する記憶部と、を備えた停止判定装置であって、前記制御部は、今回特定した期間比較値と、前記記憶部に記憶された前回特定した期間比較値との差分値を算出し、前記差分値に基づいて前記移動体が停止状態か否かを判定することを特徴とする。
(もっと読む)
検査機構
【課題】コストが嵩むことが抑制された検査機構を提供する。
【解決手段】検査装置(30)は、複数の角速度センサ(10)が搭載された回転テーブル(40)と、角速度センサ(10)の出力信号を測定しつつ、角速度センサ(10)の動作を指示する指示部(50)と、を有し、角速度センサ(10)は、センサ部(11)、スイッチ(13)、制御部(14)を有し、各センサ部(11)が対応するスイッチ(13)を介して共通配線(73)に接続され、共通配線(73)は指示部(50)と接続され、制御部(14)の1つが指示配線(71)を介して指示部(50)と接続され、全ての制御部(14)が連結配線(72)によって数珠つながりに連結され、指示信号は、遅延部(17)を介して後段の制御部(14)に入力され、制御部(14)は、指示信号が入力されると遅延時間以下の間スイッチ(13)を閉じる。
(もっと読む)
角速度検出装置及び角速度のエラー検出方法
【課題】 ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【解決手段】 本実施形態の角速度検出装置は、プラスカウンターでは、「時間」ごとに算出した平均角速度「ASMAV(deg/s)」が、例えば、3000(deg/s)以上であるときに、3を加算するとともに3000よりも小さいときに、1を減算して第1のカウンター値Pを求める。マイナスカウンターでは、前記平均角速度「ASMAV(deg/s)」が、例えば、−3000(deg/s)以下であるときに、3を加算するとともに−3000よりも大きいとき、1を減算して第2のカウンター値Mを求める。各カウンター値が所定のエラー閾値(例えば20)を越えたときにエラーと判断される。
(もっと読む)
加速度角速度センサ装置の製造方法
【課題】第1収容空間に異物が導入されることを抑制することができる加速度角速度センサ装置の製造方法を提供する。
【解決手段】
加速度検出部1および角速度検出部2が形成されたセンサ部10と蓋部20とを用意する準備工程と、センサ部10と蓋部20とを減圧空間で接合し、加速度検出部1および加熱されることによりガスを放出するガス放出材24a、50を第1収容空間3に収容すると共に、角速度検出部2を第2収容空間4に収容する接合工程と、ガス放出材24a、50からガスを放出させることにより、第1収容空間3の圧力を第2収容空間4の圧力より高くする内圧変動工程とを行う。
(もっと読む)
ジャイロ用ゼロ点補正方法及び装置
【課題】ジャイロ出力のゼロ点補正値を停車時のジャイロ出力信号によって得る時、ターンテーブルに乗って回転しているときのジャイロの出力をゼロ点補正値としないようにジャイロ出力の閾値を設定する際に、高性能のジャイロを必要とせず、また車両停止時に方位マークが回転し続ける問題を解決する「ジャイロ用ゼロ点補正方法及び装置」とする。
【解決手段】車両の停止判定時に、ジャイロの出力によってそのゼロ点補正値を算出するとき、ジャイロの標準出力値の上下に、車両がターンテーブルに乗って回転している時のジャイロの出力以内の範囲に閾値を設定する。車両の停止判定時のジャイロの出力が、閾値の範囲外にあることを検出したときから継続して閾値を超えている経過時間を算出し、経過時間が1分等の所定時間を超えたとき、車両はターンテーブルに乗っていなかったと判定して、車両の停車判定開始時のゼロ点補正値を採用する。
(もっと読む)
サーボ型静電容量式センサ装置
【課題】サーボ型静電容量式センサ装置において、構造体の振動を打ち消すサーボ力がゼロであるときを含めて、信号処理回路からセンサ素子へ供給されるサーボ信号が流通する信号線の断線有無を検出する。
【解決手段】信号処理回路14は、サーボ信号生成回路36により生成されるサーボ信号に、周波数が構造体の共振周波数に比べて十分に高い断検用信号を加算して得られる信号を、第2の信号線を介してサーボ電極に向けて供給する加算回路52と、センサ素子20からの変位信号から前記断検用信号の成分を抽出する断検用信号成分抽出回路54と、断検用信号成分抽出手段により抽出される断検用信号の成分に基づいて、第2の信号線に断線が生じているか否かを判別する断線判定回路56と、を有する。
(もっと読む)
旋回検出装置、端末装置及びプログラム
【課題】旋回検出装置、端末装置及びプログラムにおいて、ユーザが携帯する端末装置に適用した場合でも正確な旋回動作の検出を可能とすることを目的とする。
【解決手段】旋回検出装置は、ユーザに携帯される端末装置の加速度から偶数歩に相当する歩行周期を計測し、端末装置の角速度を歩行周期に応じた積分区間で時間積分することで、基準面に対する角度を示す現在の向きと歩行周期に相当する時間だけ前の向きとの差分を検出し、前記差分に基づいて端末装置の旋回を判定するように構成する。
(もっと読む)
1 - 20 / 204
[ Back to top ]