
Fターム[2F105DD20]の内容
Fターム[2F105DD20]に分類される特許
1 - 3 / 3
リングレーザジャイロ用信号処理回路及びリングレーザジャイロ装置
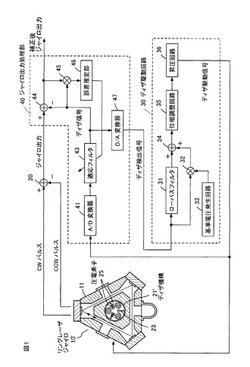
【課題】ディザ検出用圧電素子(ディザピックオフ)を不要として組み立ての簡易化を図れるようにし、さらにディザピックオフの故障によりディザ制御が不能になるといった問題を解消する。
【解決手段】ジャイロ出力処理部40とディザ駆動回路30とを備え、ジャイロ出力処理部40はディザ駆動信号をA/D変換するA/D変換器41と、A/D変換器41の出力を入力して適応フィルタ演算を行い、ディザ信号を出力する適応フィルタ43と、ジャイロ出力からディザ信号を減算して補正後ジャイロ出力を出力する減算器44と、補正後ジャイロ出力とディザ信号を乗算する乗算器45と、乗算器45の出力からディザ信号の誤差を推定して適応フィルタ43のフィルタ係数の更新値を適応フィルタ43に出力する誤差推定部46と、ディザ信号をD/A変換してディザ検出信号を出力するD/A変換器47とを備える。
(もっと読む)
電子波ジャイロ

【課題】原理的に小型化が可能な新規なジャイロを提供する。
【解決手段】導電性を有し電子波が伝播可能な円環状経路11と、円環状経路11を第1の方向に伝搬する第1の電子波と、円環状経路11を第1の方向とは逆の第2の方向に伝播する第2の電子波とを円環状経路11に生じさせる電源12(電子波発生手段)と、第1の電子波と第2の電子波との位相差を検出する検出装置14(位相差検出手段)とを備える。
(もっと読む)
光ジャイロ較正装置、光ジャイロを搭載するロボット及び光ジャイロ較正プログラム
【課題】ジャイロを搭載するロボットにおいて、ロボットの位置及び方位の測定を容易にし、ノイズの影響を抑制してジャイロの較正を行うことを可能にすることである。
【解決手段】ジャイロを搭載するロボットにおいて較正を行うときは、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定してその状態の位置データを初期値として取得し(S10,S12)、較正が開始すること等を表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間は光ジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。
(もっと読む)
1 - 3 / 3
[ Back to top ]