
Fターム[2F112AA06]の内容
光学的距離測定 (16,745) | 投光型基線長三角測距 (397) | 測距装置の光軸が固定されているもの (347) | 1個の受光素子(半導体位置検出器等)使用 (81)
Fターム[2F112AA06]に分類される特許
1 - 20 / 81
光学式測距装置およびそれを搭載した電子機器
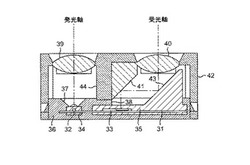
【課題】長距離を高精度に検出可能な小型の光学式測距装置を提供する。
【解決手段】受光レンズ40の下に配置された第1反射体43と受光素子33の上に配置された第2反射体41とによって受光軸を折り曲げることによって、受光レンズ40の下側の空間を有効に利用して焦点距離を大きく取ることができる。然も、測距モジュールの外部に光路変更手段を設ける場合よりも小型化することができる。こうして、長距離を高精度に検出可能な小型の光学式測距装置を提供することができる。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法

【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。レンズフレーム11は、表面および裏面に凹凸構造11bを有している。発光レンズ5および受光レンズ6とレンズフレーム11との密着力が大幅に向上するので、発光レンズ5および受光レンズ6とレンズフレーム11との滑りを防止することができる。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。2次モールド9の上面に形成された固定穴9aと、レンズフレーム11に形成された貫通穴11aに3次モールド10を形成するための遮光性樹脂を充填することにより、アンカー10aを形成する。レンズフレーム11が金属からなることにより、周囲温度の変化および自己発熱によってもほとんど熱膨張しないために、レンズ間距離の変化量の差がほとんどない。また、アンカー10aにより、レンズフレーム11を2次モールド9および3次モールド10の間に固定するので、レンズフレーム11と2次モールド9および3次モールド10との間で生じる熱膨張係数の差による滑りを抑える。
(もっと読む)
検知距離設定装置及びこの検知距離設定装置を備えた自動水栓装置
【課題】装置の誤作動を防止できる検知設定部及びこの検知距離設定装置を備えた自動水栓装置を提供する。
【解決手段】自動水栓装置1はスパウト4と電磁弁5と検知距離設定装置6を備えている。スパウト4の先端部4bには吐水口8が設けられている。電磁弁5は吐水口8からの水の吐水と止水とを変更可能である。検知距離設定装置6はスパウト4の先端部4bに検知物が近付いたか否かを検出する検知センサ9と制御装置10を備えている。制御装置10は赤外線発光素子12に鉢3の底面3aに向かって発光させて位置検出素子13からの値と予め定められた基準判定距離に位置する鉢3のも底面3aからの反射光を受光した際に位置検出素子13が出力する基準判定値とを比較して鉢3の底面3aが基準判定距離外に位置していると判定すると基準判定値に基づいて判定値を定める。
(もっと読む)
検知距離設定装置及びこの検知距離設定装置を備えた自動水栓装置
【課題】判定距離が非常に短い値となって、使い勝手が悪化してしまうことを防止できる検知設定部及びこの検知距離設定装置を備えた自動水栓装置を提供する。
【解決手段】自動水栓装置1はスパウト4とカバー17と検知距離設定装置6とを備えている。スパウト4の先端部4bには吐水口8と検知センサ9が設けられている。カバー17は吐水口8に係止し検知センサ9を覆ってスパウト4の先端部4bに取り付けられる。検知距離設定装置6はスパウト4の先端部4bに検知物が近付いたか否かを検出する検知センサ9と制御装置を備えている。制御装置は赤外線発光素子に鉢の底面に向かって発光させて位置検出素子からの値と予め定められた設定動作開始距離に応じた設定動作開始値とを比較して検知物が設定動作開始距離外に位置していると判定すると判定値の設定を開始する。
(もっと読む)
動体判別機能付き電子機器
【課題】測定対象物が動体であるか否かを正確に判別することができるコンパクトな動体判別機能付き電子機器を提供する。
【解決手段】動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
反射型光電センサおよびその製造方法
【課題】接着剤の流出を防ぎ、高感度で、信頼性の高い反射型光電センサを提供する。
【解決手段】発光素子3と、発光素子3前方に設けられた投光レンズ1と、発光素子3からの光を受光する受光素子4と、受光素子4前方に設けられた受光レンズ2と、受光素子4からの出力信号に基づき、信号処理を行う主回路部5とを具備した、反射型光電センサであって、投光レンズ1及び受光レンズ2の少なくとも一方を、接着剤で固定した構造体6を具備している。そしてこの構造体6は、接着剤を接続部に供給する供給部11と、供給部11から供給された接着剤を接続部に導くガイド部6gとを具備し接着剤の流出を防止する。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
投光ビームの調整方法
【課題】シャインプルーフ光学系を用いた光学式変位センサにおいて、測定精度が安定した投光ビームの調整方法を提供する。
【解決手段】シャインプルーフ光学系を用いた光学式変位センサ10は、測定対象物に対して光を照射する投光モジュール9と、投光モジュール9からの光が測定対象物で反射して、反射光を受光面で受光する受光部13と、測定対象物と受光部13との間に位置して、反射光を受光面に結像する受光レンズ14とを備える。投光ビームの調整方法は、受光部13における像のサイズが、投光モジュール9を構成する投光レンズ12と測定対象物との距離によらず一定になるように光源11から照射される光の焦点位置を調整する。
(もっと読む)
光学式測距装置
【課題】簡単な構造にて、周囲温度の変化と自己発熱とによる測距精度の低下を防ぐことができる光学式測距装置を提供する。
【解決手段】測距対象物までの距離を測定しているときの温度センサ25によって検出された温度と、上記距離を測定していないときの温度センサ25によって検出された温度との変化量に基づいて検出値を補正した後に三角測距法により測距対象物までの距離を算出する受光素子12と、発光レンズ14及び受光レンズ15の間の距離を制御するレンズ間距離制御部18とを備えており、レンズ間距離制御部18は、測距装置10の周囲温度の変化によって生じる測距装置10の温度の変化に対する、発光レンズ14と受光レンズ15との間の距離の変動量と、測距装置10の自己発熱によって生じる測距装置10の温度の変化に対する当該距離の変動量とを近づけるように、当該距離を制御する。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】高耐熱性を有してリフローまたはフロー半田による実装を可能にする。
【解決手段】発光素子12と受光素子13および信号処理部14との夫々を透光性樹脂で封止して成る第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂で一体成形して第3樹脂形成体18を形成し、この第3樹脂形成体18上に、金属部25に熱硬化性樹脂で発光レンズ23および受光レンズ24が成形されたレンズ板21を載置する。そして、高耐熱の遮光性熱可塑性樹脂で一体成形して第4樹脂形成体26を形成し、レンズ板21を第4樹脂形成体26によって第3樹脂形成体18に固定する。このように、第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂でモールドすると共に、発光レンズ23および受光レンズ24を熱硬化性樹脂で成形することにより、光学式測距センサの実装時における耐熱性を高め、リフローまたはフロー半田による実装を可能にする。
(もっと読む)
測距センサおよび電子機器
【課題】周辺光による誤測距または誤検知を回避することができる測距センサを提供する。
【解決手段】測距センサ1は、第1信号光Rf1を出射する第1発光素子11と、第2信号光Rf2を出射する第2発光素子12と、第1信号光Rf1または第2信号光Rf2を受光して受光信号を出力する受光素子部20とを備える。第1発光素子11および第2発光素子12は、受光素子部20の光軸20bと交差する平面上に配置され、第1発光素子11は、平面上で受光素子部20の光軸20bに対して第1方位に配置され、第2発光素子12は、平面上で受光素子部20の光軸20bに対して第1方位とは異なる第2方位に配置されている。これによって、周辺光による誤測距または誤検知を回避することができる。
(もっと読む)
光学式測距装置および電子機器および光学式測距装置の校正方法
【課題】パッシブ測距方式を用いずに、窓材からの反射による誤測距または誤検知を防止できる小型の光学式測距装置を提供する。
【解決手段】受光素子12は、発光素子から出射されて測距対象物16により反射された第1の光束17と発光素子11から出射されて窓材15により反射された第2の光束18とを受光レンズ14を介して受光して、第1,第2の光束17,18の受光素子12上における光強度分布を検出する。光強度分布抽出部により、受光素子12により検出された第1,第2の光束17,18が照射された受光素子12上における光強度分布から、第2の光束18の受光素子12上における光強度分布を減算して、第1の光束17の受光素子12上における光強度分布を抽出する。光強度分布抽出部により抽出された第1の光束17の受光素子12上における光強度分布に基づいて、測距対象物16までの距離を距離演算部により演算する。
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】小型,高性能であり、リフローやフロー半田による実装が可能な安価な光学式測距センサを提供する。
【解決手段】基板11上の発光素子12と受光素子13および信号処理部14とを透光性樹脂で封止して成る樹脂形成体15,16を、遮光性樹脂で一体成形して樹脂形成体17を形成し、樹脂形成体17の上面および両側面を熱硬化性樹脂のレンズ19,20が設けられた金属性のレンズ板21で覆って、光学式測距センサを構成している。また、レンズ板21の下端部をGND端子としている。こうして、カーボン入り熱可塑性樹脂のレンズ付きケースを用いる場合よりも耐熱性を高めて、半田付けにより確実に実装することができる。また、レンズ板21に凸状部21aを設けたので、発光側からの光が受光側レンズ20に直接入射するのを防止できる。また、基板11を用いたので、樹脂封止の際に裏側まで樹脂成形する必要がなく厚さを薄くできる。
(もっと読む)
1 - 20 / 81
[ Back to top ]