
Fターム[2F112AA09]の内容
光学的距離測定 (16,745) | 投光型基線長三角測距 (397) | 測距装置の光軸が固定されているもの (347) | 2次元受光素子(TVカメラ等)の使用 (147)
Fターム[2F112AA09]に分類される特許
1 - 20 / 147
光学式測距装置およびそれを搭載した電子機器
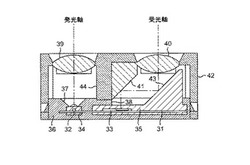
【課題】長距離を高精度に検出可能な小型の光学式測距装置を提供する。
【解決手段】受光レンズ40の下に配置された第1反射体43と受光素子33の上に配置された第2反射体41とによって受光軸を折り曲げることによって、受光レンズ40の下側の空間を有効に利用して焦点距離を大きく取ることができる。然も、測距モジュールの外部に光路変更手段を設ける場合よりも小型化することができる。こうして、長距離を高精度に検出可能な小型の光学式測距装置を提供することができる。
(もっと読む)
変位測定方法および変位測定装置

【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
光3次元カメラ
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
変位センサ
【課題】被測定物の表面の反射の状態によって、変位センサの測定方式を切り換えたり、変位センサを交換したりすることを不要にする。
【解決手段】拡散反射板212は、レーザ光源231から出射され、ワーク102の加工面で正反射されたプローブ光が入射する位置に配置されている。リニアセンサ233は、拡散反射板212により拡散反射されたプローブ光がさらにワーク102の加工面で反射された第1の反射光、レーザ光源231から出射されたプローブ光がワーク102の加工面で拡散反射された第2の反射光を受光する。信号処理部234は、第1の反射光によりプローブ光がワーク102の加工面を介して拡散反射板212に入射するまでの第1の距離を検出するか、または、第2の反射光によりプローブ光がワーク102の加工面に入射するまでの第2の距離を検出する。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。レンズフレーム11は、表面および裏面に凹凸構造11bを有している。発光レンズ5および受光レンズ6とレンズフレーム11との密着力が大幅に向上するので、発光レンズ5および受光レンズ6とレンズフレーム11との滑りを防止することができる。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。2次モールド9の上面に形成された固定穴9aと、レンズフレーム11に形成された貫通穴11aに3次モールド10を形成するための遮光性樹脂を充填することにより、アンカー10aを形成する。レンズフレーム11が金属からなることにより、周囲温度の変化および自己発熱によってもほとんど熱膨張しないために、レンズ間距離の変化量の差がほとんどない。また、アンカー10aにより、レンズフレーム11を2次モールド9および3次モールド10の間に固定するので、レンズフレーム11と2次モールド9および3次モールド10との間で生じる熱膨張係数の差による滑りを抑える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
自動給水装置
【課題】検出手段にCCDやCMOSなどの撮像素子を利用した自動給水装置において、消費電力の上昇を抑えて良好な省エネ効果を実現した自動給水装置を提供すること。
【解決手段】自動給水装置1は、撮像データを取得する撮像部26と、撮像部26を制御する撮像制御部31と、撮像データを利用して使用者を検出する人体検出部32と、使用者の検出に応じて水が供給されるように制御する給水制御部33と、を備えており、撮像制御部31は、動作期間及び非動作期間が交互に現れる間欠動作が行われるように撮像部26を制御すると共に、動作期間において、撮像データを取得するときのみ受光に応じて電荷が蓄積される蓄積状態が設定され、それ以外では非蓄積状態が設定されるように撮像部26を制御する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
1 - 20 / 147
[ Back to top ]