
Fターム[2F112AD00]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821)
Fターム[2F112AD00]の下位に属するFターム
光波の伝搬時間を測定するもの (546)
測距対象による反射光強度を測定するもの (70)
三角測量の原理によるもの (43)
その他 (159)
Fターム[2F112AD00]に分類される特許
1 - 3 / 3
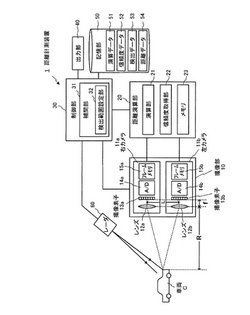
距離計測装置、距離計測方法および距離計測プログラム
【課題】信頼性の高い距離情報を取得すること。
【解決手段】本発明にかかる距離計測装置1は、撮像部10から出力された画像信号群に基づいて撮像視野内に位置する物体までの距離を演算する演算部21と、演算部21による演算値の信頼度を取得する信頼度取得部22と、信頼度が評価基準を満たしていない演算値をレーダ60の検出値で置き換える補間部31と、信頼度が評価基準を満たしていない演算値に対応する範囲をレーダ60の検出範囲として設定する検出範囲設定部32と、検出範囲設定部32が設定した検出範囲内に位置する物体までの距離を検出するレーダ60とを備える。本発明にかかる距離計測装置1によれば、信頼度が評価基準値を満たしていない演算値を、精度の高いレーダ60の検出値で置き換えた距離データを出力するため、信頼性の高い距離情報を取得することができる。
(もっと読む)
障害物検出装置

【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
レーザ・パルスを用いて光学リンクを製造する方法と装置
【課題】 本発明は、移動物体の位置を定めるための光学リンクをレーザ・パルスにより製造する方法と装置に関する。
【解決手段】 本発明の特徴とするところは、上記のレーザ・パルスを多少なりとも受信器の方向へ照射し、照射の開始から経過する時間(t)の増加する関数として連続レーザ・パルス(4)のエネルギーを変化させることである。上記のレーザ・パルスの照射の開始は移動物体の発射から遅らせられる。 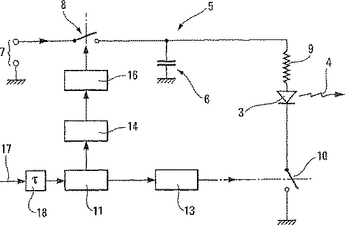 (もっと読む)
(もっと読む)
1 - 3 / 3
[ Back to top ]